
点睛:未来家园
署书:乔惠民 中国国土经济学会研究室主任
栏头拓制:乔杨
插播导读:国土名片网小编芬儿
未来城市空中交通管理研究综述
张洪海,邹依原,张启钱,刘皞
1.南京航空航天大学 民航学院,南京 210016 2.南京航空航天大学 理学院,南京 210016
1 城市空中交通发展概况
1.1 基本概念
城市交通是城市社会经济活动的重要支撑,是未来城市建设发展的关键所在。目前,人们提出了许多未来城市运行概念,但是,任何概念都离不开智能交通运输系统[1]。城市空中交通(Urban Air Mobility, UAM)作为其中的重要一环,近些年来,在5G通信、自动驾驶与电力推进技术的推动下,引发了社会各界的广泛关注。优步(Uber)[2]、空客(Airbus)[3]、美国国家航空航天局(National Aeronautics and Space Administration, NASA)[4]、麻省理工学院(Massachusetts Institute of Technology, MIT)[5-7]、密歇根大学(University of Michigan, UMich)[8]、美国MITRE科技公司[9]、巴西航空工业公司(EmbraerX)[10]、中国亿航智能[11]等相关研究组织与机构分别对城市空中交通运行概念进行了不同程度的探讨。NASA[4]指出城市空中交通作为按需交通(On-Demand Mobility)[12-13]的子集,是一种适用于载人航空器与无人航空器系统的新型交通运作模式。UMich[8]提出了未来城市空中交通的2种发展途径:第1种是有人驾驶发展模式,通过拓展传统空中交通管制(Air Traffic Control, ATC)职能[5],探究驾驶员与管制员在新型城市空中交通运行模式下的相互关系,将现有空中交通管理(Air Traffic Management, ATM)概念推广应用到城市空中交通管理中,以此来推动城市空中交通的快速发展;第2种是无人驾驶发展模式,通过自动驾驶、自动控制等自动化、智能化技术的发展,在无人驾驶航空器系统(Unmanned Aircraft System, UAS)概念的基础上,进一步提高城市空中交通系统保障能力,以确保城市空中交通载人载货飞行的安全性与可靠性。
城市空中交通是指在城市低空空域内主要利用垂直起降或短距起降航空器及相关系统设施实现载人载货空中运输的活动。目前,城市空中交通空域范围没有明确定义。NASA[4]认为城市空中交通空域应当主要包括E类与G类空域,视城市周边机场规模,可能包含B类至D类空域。根据中国空域划分特点,城市空中交通的活动范围应当主要集中于低空空域。低空空域一般是指真高1 000 m(含)以下的飞行区域,可分为管制空域、监视空域、报告空域以及目视飞行航线。未来将实现真高3 000 m以下监视空域和报告空域无缝衔接。城市空中交通的载运工具主要包括短距起降(Short Take Off and Landing, STOL)航空器[14-15]、垂直起降(Vertical Takeoff and Landing, VTOL)航空器[16]与电推进垂直起降(electric Vertical Takeoff and Landing, eVTOL)航空器[17]等。这些航空器的主要特点在于起降所需场地小,节省城市空间,且不易受城市复杂环境的影响,飞行冲突解脱自由度高,对自动驾驶技术更为友好,容易实现点到点的按需运行。城市空中交通具有立体、便捷、及时、高效等优点,能有效缓解城市交通拥堵问题,可与地面道路交通、地下轨道交通形成互补和联动,并将逐步发展成空地下三位一体的新型城市综合交通体系。
1.2 市场需求
随着城市化进程不断加快,城市人口数量急剧增长,陆用空间日趋饱和,交通拥堵问题日益严重,有限的交通资源与不断膨胀的交通需求之间矛盾激化,亟需开发城市空中可用空间,发展垂直式立体交通,逐步构建以空中交通为基干的未来城市综合交通系统。
2018年2月至4月,包豪斯航空[18]在德国慕尼黑对248名受访者进行了城市交通出行偏好调查。结果表明,大众对于城市空中交通出行方式表示普遍认可,其中,出行时间、出行成本以及交通安全性可能是决定城市空中交通能否运行的关键性因素。皇家墨尔本理工大学(Royal Melbourne Institute of Technology, RMIT)[19]针对澳大利亚墨尔本地区进行了城市交通出行方式对比分析,研究表明,城市道路交通的拥堵现状将使城市空中交通获得巨大的潜在市场,城市空中交通在出行时间上具有显著优势。据保时捷管理咨询公司(Porsche Consulting)[20]预测,2035年将有2.3万辆eVTOL航空器服务于价值740亿美元的全球市场;据摩根士丹利(Morgan Stanley)[21]预测,2040年全球城市空中交通的产业规模可能达到1.5万亿美元。NASA在城市空中交通市场分析报告[22]中指出,空中公交车(Air Metro)市场运行预计将在2028年开始盈利,并且于2030年空中公交车旅客出行次数将达7.4亿人次,而无人机物流市场将于2030年承担5亿单 “最后一公里” 配送运输服务。
然而,尽管城市空中交通市场需求旺盛、应用前景广阔,城市空中交通生态体系在空域管理、适航条例、基础设施建设以及社会认知接受度等方面仍需进一步完善[23]。需采取有效的城市空中交通发展战略,建立完善的城市空中交通管理体系,实现城市空中交通安全高效、自动智能、绿色环保的高质量发展。
2 城市空中交通发展历程
2.1 历史沿革
城市空中交通的观念由来已久,自1939年直升机问世以来,直升机的独特优势不断引发人们对于城市空中交通的思考。根据不同时期的研究热点以及运行概念的不断更迭,城市空中交通的发展历史大致可分为以下3个阶段:
第1阶段:1947—1980年。1947年,洛杉矶航空公司首次进行有执照的定期商用直升机飞行,主要用于邮件运输。1951年,美国直升机航空公司开始提供首批货运服务;1953年,开始提供首批客运与快递服务[24]。1964年和1967年,美国航空[25]与美国西科斯基飞行器公司[26]分别提出了短距起降与垂直起降(S/VTOL)航空器在城市运营的初步构想。1972年,NASA[27]分别从飞行器设计、噪音污染、通信导航、空中交通管制、机场运行模式等方面对城市空中交通系统进行了深入地探讨。1973年,南加利福尼亚大学(University of Southern California, USC)出版了城市空中交通与城市规划专著[28],分别从形势分析、法规政策、运行特点、环境影响等方面论述了城市空中交通发展的困难与可能性。1980年,休斯直升机公司[29]指出直升机运输是满足城市交通运输需求的有力解决方式。总的来说,城市空中交通发展的第一阶段主要源于直升机飞行服务的兴起,在这一阶段,城市空中交通运行概念初步形成。然而,由于直升机飞行事故频发,最早进行直升机服务的洛杉矶航空公司与纽约航空公司分别于1971年[30]与1979年[4]停止运营,自此城市空中交通发展进入了低谷期。
第2阶段:2003—2014年。2003年,伴随着NASA个人飞行器(Personal Air Vehicle, PAV)概念的提出[31]以及按需运营(On-Demand)、门到门服务(Door-to-Door)空中交通运输方式的兴起[32],城市空中交通再次进入研究人员的视野。2006年,英国兰卡斯特大学(Lancaster University)[33]分析了当代人们对于门到门空中飞行的渴望与需求,研究了巴西圣保罗直升机旅行服务的兴起过程,展望了城市直升机航空旅行的未来与前景。2009年,美国Terrafugiai公司推出的全球首辆飞行汽车“飞跃/变形者”(Transition)[34]成功试飞,并于2012年进行换代升级。总的来说,由于城市人口不断增长,人们对于城市空中交通运输需求不断增加,并且随着航空技术的发展,航空事故率相较于20世纪80年代以前已经大幅度降低[35]。飞行汽车的概念,推动了汽车与航空器的融合,为城市空中交通运行带来了新的可能。
第3阶段:2014年至今。2014年,NASA首次提出了无人机交通管理(UAS Traffic Management, UTM)的概念[36],并于2016年对UTM运行概念(Concept of Operations, ConOps)进行了全面的阐述[37],这标志着无人机时代全面降临。2016~2017年,南洋理工大学针对新加坡城市特点,也相应提出面向城市环境的无人机交通管理(TM-UAS)运行概念[38-39],促使小型无人机融入城市空中交通系统。与此同时,2016年,Uber发布了未来城市空中交通计划白皮书[2],全面阐述了未来城市飞行汽车运营构想,引发了全球城市空中交通研究热潮。2017年,NASA正式提出了Urban Air Mobility(UAM)这一专业术语[40],自此关于城市空中交通的研究层出不穷。
2.2 发展现状
近些年来,随着自动驾驶、人工智能、5G通信等技术的兴起,城市空中交通迎来了新一批的研究热潮。目前世界各国对于城市空中交通的研究进度不一,主要集中于城市低空小型无人驾驶航空器系统(small UAS, sUAS)的交通管理(UTM[37]、U-space[41]等)以及基于空中出租车、空中公交车等载人eVTOL航空器的UAM运行概念等方面。本文主要从美国、欧洲、中国以及其他国家和地区这4个角度对世界各国的城市空中交通发展现状进行梳理。
1)美国。2016年,NASA、美国联邦航空管理局(Federal Aviation Administration, FAA)以及美国工业界、学术界联合研制了UTM运行概念框架[37,42],论述了UAS从非管制空域运行到管制隔离空域运行再到管制空域混合运行的阶段性发展过程,制定了UAS技术能力(Technical Capability Levels, TCL)发展的4个等级,以此来逐步实现从视距内运行(Visual Line of Sight, VLOS)到超视距运行(Beyond VLOS, BVLOS)、从城郊人口稀疏区到城区人口稠密区、从人工手动控制到智能自动管理的转变。目前,美国已经完成了TCL2与TCL3飞行测试与论证[43-45]。随之,美国Uber公司在NASA以及学术界的帮助下,发布了未来城市空中交通计划白皮书[2],结合VTOL航空器发展潮流,探究按需运行的城市空中交通运行模式,提出要建立像UTM一般的空中交通管理框架,实现城市空中交通与机场终端区的无缝衔接。2017年,NASA在此基础上对按需运行的交通模式作出了更深入的探讨[12,13]。2018年,NASA正式提出了UAM空域融合概念[4],并将UAM发展分为了3个阶段:① 新兴阶段:沿固定航线进行低速度、低密度飞行;② 发 展阶段:围绕某一枢纽,实现小型立体网络运行;③ 成熟阶段:多枢纽、高速度、高密度运行。此外,美国MIT、UMich等也分别针对UAM的运行限制[5-7]与发展途径[8]作出了进一步深入研究。
2)欧洲。2017年,欧盟与欧控成立的欧洲单一天空计划(Single European Sky ATM Research, SESAR)联合企业发布了U-space设计蓝图[41],旨在为欧洲未来无人机安全、高效、大规模混合运行提供一套新型智能服务程序。与美国UTM类似,U-space根据UAS自动化与连通等级的不同,将UAS服务发展分为了4个阶段:基础服务阶段、初级服务阶段、高级服务阶段与全域服务阶段。为了更好地推进U-space研究,同年9月,SESAR启动了欧洲无人机交通管理系统运行概念(Concept of Operations for European UTM Systems, CORUS)项目,旨在面向包括机场附近超低空空域(Very Low Level, VLL),提出一套完善的欧洲UTM运行概念体系,该项目于2019年8月底结束,并于同年9月发布了U-space运行概念研究报告最终版[46-47]。目前,U-space下已启动了19个项目来进行UTM第2阶段论证与第3、第4阶段的研究与探索[48]。此外,空客也在2018年发布了天空蓝图[3],从空域结构、系统架构、规则标准、发展规划4个角度对未来城市自主航空器运行提出了一定的设计构想。
3)中国。中国目前正在逐步形成全国统一的民用无人驾驶航空器运行管理综合平台(Civil UAS Operation Management, UOM)[49],2018年1月,国家空中交通管制委员会办公室组织起草了《无人驾驶航空器飞行管理暂行条例(征求意见稿)》,旨在规范无人机飞行活动,限制无人机活动范围,明确无人机运行的法律责任,促进无人机产业安全健康发展。同年11月,中国民航局在深圳地区启动了无人机飞行管理试点工作,正式上线了中国民航局无人驾驶航空器空中交通管理信息服务系统(Civil Aviation Administration of China UTM Information Service System, UTMISS)。通过UTMISS系统,可实现无人机限制区划设,飞行计划申请、信息数据共享等服务。2019年2月,民航局发布《特定类无人机试运行管理规程(暂行)》,使用无人系统规则制定联合体(Joint Authorities for Rulemaking of Unmanned Systems, JARUS)推出的特定运行风险评估(SORA)方法[50],实施无人机安全风险管理,鼓励并有序推进典型运行情景下无人机的试点与示范运行。2020年1月,亿航智能发布《未来交通:城市空中交通系统白皮书》[11],从eVTOL飞行器设计、现实运行限制因素、未来应用与发展前景等方面对城市空中交通运行概念进行了多方位的阐述,展现了城市空中交通巨大的市场潜力,提出了全自动无人驾驶飞行器(Autonomous Aerial Vehicle, AAV)的概念,着重强调全自动无人驾驶且应用于载人载货的飞行器设计理念。中国民用航空飞行学院的李诚龙等[51]提出了一种面向eVTOL航空器的城市空中交通运输管理基本框架,综述了空域规划、地面基础设施、交通运行控制3方面的研究现状,初步探讨了城市空中交通管理中的关键问题。本文结合自身研究基础和初步成果,设计城市空中交通运行概念,构建适合我国的未来城市空中交通管理体系架构,围绕空域规划、流量控制、交通服务、基础设施建设等四个核心内容,深入论述城市空中交通管理的研究领域、面临挑战和发展建议。
4)其他国家及地区。除了美国、欧洲与中国之外,日本、新加坡等国家及地区也发展了相应的城市空中交通系统。2016年4月,日本经济产业省(Ministry of Economy, Trade and Industry, METI)发布了日本UAS运行四级发展规划,力争至2018年实现第3阶段发展目标[52]。同年8月,日本无人机运行管理联合体(Japan Unmanned System Traffic & Radio Management Consortium, JUTM)成立,并于2017年在福岛进行UTM运行概念飞行试验[53-54]。2018年12月,METI发布了日本未来空中交通变革路线图,促进城市空中交通大规模商业化运营的逐步实现[55]。同样地,新加坡民航局(Civil Aviation Authority of Singapore, CAAS)与南洋理工大学面向新加坡城市人口密度极高的独特环境,联合研制了面向城市的无人机交通管理系统(Traffic Management of UAS, TM-UAS)[38,39]。
3 城市空中交通管理体系框架
尽管中国在无人机交通管理方面有着较为丰硕的成果[56],大疆无人机、亿航全自动无人驾驶飞行器的研制方面也处于世界领先地位,然而中国对于城市空中交通管理的研究才刚刚起步,城市空中交通的管理模式也尚不明确。因此,本文将结合无人机交通管理(UTM)的前沿理念与传统空中交通管理(ATM)的成熟经验,对中国城市空中交通管理体系框架进行初步的研究与探索。
3.1 运行概念设计
3.1.1 设计范围
在进行城市空中交通(UAM)管理运行概念设计之前,首先需要明确UAM运行的范围与状态,设计规划未来UAM发展的不同等级与阶段。NASA[4]基于飞行密度与公众接受度将UAM的发展分为了新兴、发展与成熟3个阶段,无人机交通管理(UTM)基于运行环境与自动化水平也被划分为了4个技术能力等级[37]。虽然目前城市范围内无人驾驶航空器系统(UAS)、垂直起降航空器(VTOL)与传统通用航空器的运行模式相互独立发展,但是未来UAM所面临的必然是这3种类型航空器高密度、大规模混合飞行。因此,本文参考NASA关于UAM与UTM的发展阶段划分方法,根据运行环境、自动化等级以及空域融合程度的不同,将UAM的发展划分为兴起、初级、高级、成熟4个阶段。
1)UAM兴起阶段:在该阶段,UAS与VTOL各自独立运行,且均在机场管制空域以外的低空区域。根据无人机交通管理(UTM/UOM)的运行限制,UAS主要在120 m以下的城市低人口密度区进行视距内(VLOS)运行,无人机的安全运行责任主要由地面飞手承担;120~150 m为过渡缓冲地带,VTOL应当在150 m以上的低空空域运行,且与通用航空类似,VTOL的安全能力主要依靠航空器驾驶员提供。此时,UAM基本处于试运营阶段,城市空中交通管理部门主要负责提供可用空域划设、飞行计划审批、空域动态监视、静态电子围栏等服务。
2)UAM初级阶段:在该阶段,UAS与VTOL依然是各自独立运行,但可在机场附近划设隔离空域作为UAS活动区,且VTOL能够进入机场管制空域并实现机场起降。随着自动化技术的提升,UAS的飞行控制权逐渐移交到机载飞控系统,地面飞手主要起飞行监视与应急处理的作用,UAS可以进行低密度、低流量的超视距(BVLOS)运行。相应地,VTOL开始具备巡航自动驾驶功能,且能够在限定的中低人口密度区,实现低流量的点对点按需运行。此时,UAM处于运营初级阶段,已初步形成UAM航路网络干线结构,如图1所示。城市空中交通管理部门主要负责提供可用空域规划、飞行计划管理、空域实时监控、动态电子围栏等服务。
图1 城市空中交通发展初级阶段概念图
3)UAM高级阶段:在该阶段,UAS与VTOL开始逐步混合运行,VTOL运行空域与机场附近管制空域开始融合,满足所需性能的VTOL在管制员许可下可以在管制空域与传统飞机进行混合飞行。UAS的飞行高度将不再限制为120 m以下,VTOL也逐渐发展为全自动无人驾驶飞行器(AAV),具备完全自主的无人驾驶飞行功能。地面飞手可以在系统辅助下进行一对多的BVLOS飞行,VTOL驾驶员将主要承担飞行过程中应急监控的责任。此时,UAM处于运营高级阶段,已形成UAS/VTOL相互融合的城市低空航路网络,能够实现中等密度、中等流量点对点按需运行。由于UAM运输需求具有实时性,该阶段UAM飞行计划无需审批,仅需报备,皆由信息系统自动提交处理。飞行冲突主要依靠机载探测与防撞系统(Detect and Avoid, DAA)或驾驶员协商避让解决。城市空中交通管理部门主要提供航路网络规划、终端或航路流量控制、防撞避险告警、事故应急处置等服务。
4)UAM成熟阶段:在该阶段,城市低空空域与机场管制空域高度融合且无缝衔接,所有类型的UAM航空器均为全自动无人驾驶飞行器(AAV)。UAS与VTOL合并,形成垂直起降无人驾驶航空器系统(VTOL UAS),为UAM提供载人载货的运输服务。此时,UAM处于高度智能自主的成熟阶段,城市空域已形成高密度、高流量的精细柔性动态航路网络结构。UAM的运行调度、优化排序、航迹规划等一系列最优化问题均由城市空中交通管理系统统一处理。由于风切变、系统故障等不可控原因,UAM航空器发生飞行冲突,由DAA系统进行自主避让调控。城市空中交通管理部门主要提供UAM系统监控与事故应急管理等服务。
3.1.2 设计内容
根据上述UAM发展阶段划分,目前中国正处于UAM发展的兴起阶段。由于中国无人机交通管理平台UOM建设起步较早,无人机设计、制造、适航、生产、运营、管理等已形成一条较为完整的无人机产业链,而电推进垂直起降航空器(eVTOL)还处于设计与试飞阶段。然而,考虑到未来UAM运行管理需求以及UAS与VTOL混合运行趋势,本文将主要针对UAM发展前3个阶段(尤其是UAM高级阶段),从空域规划、流量控制、交通服务和基础设施建设4个方面,设计城市空中交通管理运行概念。
1)空域规划
空域规划应当是一种偏向战略型的城市空中交通管理模式,但是有时也会根据实际运行需要,进行实时动态调整,通常涉及以下3个方面:
① 空域划设:根据某种分类标准,规定不同类型空域的运行限制,从而划设空域的时空范围。比如根据是否可飞,可以将空域划分为禁飞区、限飞区、适飞区等;根据飞行自由度,可以将空域划分为自由空域、分层空域、扇形空域、管道空域等[57]。空域类型决定了空域的用途,在同一类型空域内运行的航空器具有相似的特点,某一块空域可能对应多种空域类型。
② 航路网络:由于城市低空时空环境复杂多变,在UAM中,航路应当具有更加广泛的含义。根据空域结构的不同,(广义)航路可相应分为:自由航路、分层航路、扇形航路、管道航路等。已知某一空域的结构与进出点对,即可确定该空域内(广义)航路的连通特征[58]。因此,航路网络规划可定义如下:以某种特定的运行方式,通过相邻空域进出节点,将不同类型或不同结构的空域顺次连通,在达到空域安全目标水平的同时,尽可能地提高空域运行效率,满足用户需求。航路网络规划示意图如图2所示。
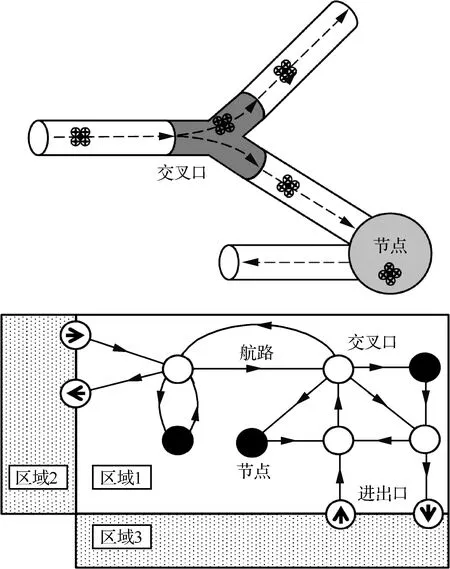
图2 城市空中交通航路网络规划示意图[58]
③ 容量评估:UAM容量评估主要是评估航路网络的通行能力。其中包括UAM计划阶段的半静态容量评估与UAM运行阶段的动态容量评估。一方面,容量评估为流量控制与交通服务奠定基础;另一方面,它也反映航路网络规划是否合理,能否满足实际飞行需求。
2)流量控制
流量控制应当是一种战术与实时并存型的城市空中交通管理模式。传统空中交通流量管理根据实施时间不同,可分为先期流量管理、飞行前流量管理与实时流量管理,且以先期与飞行前流量管理为主,而实时流量管理为辅,主要采取的流量控制措施有地面等待策略、空中等待策略、改航策略等。然而,在城市空中交通发展高级阶段,UAM多为按需运行,其实时性、动态性较强,空域态势较为复杂,可预测性相对较低,仅通过先期或飞行前的流量控制策略,难以适应UAM的实时变化,从而无法解决UAM容流不平衡问题。因此,城市空中交通流量控制应当以实时流量控制为主:将流量控制作用于航路网络节点,实现类似于地面交通的信号控制作用[59],促使航空器实施改航、空中等待、地面等待等策略,以此来实现航路网络交通流的自适应调控,其示意图如图3所示[59]。

图3 城市空中交通流量控制示意图[59]
3)交通服务
交通服务应当主要包括交通信息服务、交通规划服务、交通安全服务等。
① 交通信息服务是指向用户提供航行情报等一切与UAM用户飞行相关的信息或数据,可由用户通过网络进行查询或由系统智能通告。
② 交通规划服务主要是指航迹规划:在已知起讫点的情况下,能够通过既有航路网络来提供一条时间最短或能耗最低的可行航线,以确保航空器能够顺利完成交通运输任务。
③ 交通安全服务是交通服务的核心业务,主要包括安全间隔、防撞告警、风险预警、应急处置等服务。其中,风险预警服务除了对非法侵入、系统失效、危险接近等风险进行预警之外,还包括对公共安全的风险预警,若航空器接近人口密集区且无法达到等效目标安全水平(Equivalent Level of Safety, ELOS)[60],则系统自动启动风险紧急预警。通过交通安全服务,可以确保城市空中交通安全有效运行。
4)基础设施
基础设施主要分为垂直起降机场(Vertiport)与通信导航监视(Communication, Navigation, Surveillance, CNS)设施:
① 垂直起降机场布局应当考虑UAM运输需求,建立垂直起降场、垂直起降站、垂直起降点的三级协同布局运输体系,科学配置公共运输航空器数量、起降站与起降点布局以及三级场址之间的协调关系,实现UAM高效运行。其中,垂直起降点可分为机动型与固定型,机动型主要分布在地面道路附近,可实现汽车到飞行汽车的灵活转换[61],示意图如图4所示;固定型可分布在楼顶、公园、社区等可用空间狭小的公共区域。
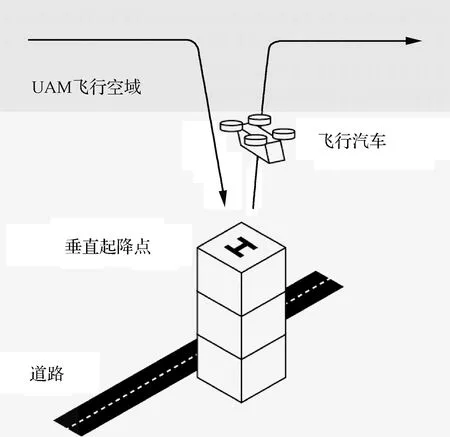
图4 城市空中交通机动型垂直起降点示意图[61]
② 通信导航监视设施可在现有设施的基础上进一步拓展。通信:充分利用互联网协议技术标准IPv6(Internet Protocol version 6)以及 5G通信技术的优势,实现空对空、空对地、地对地通信网络的无缝衔接,从而提供端到端的通信服务[4]。导航:在传统地基导航的基础上,利用全球卫星导航系统(Global Navigation Satellite System, GNSS),尤其是中国北斗卫星导航系统(BeiDou Navigation Satellite System, BDS),在北斗地基与星基增强系统的作用下,可为未来UAM大规模运行提供精准定位与导航。监视:利用广播式自动相关监视(Automatic Dependent Surveillance-Broadcast, ADS-B)等协作式监视技术与高分辨率摄像机监视系统、红外探测系统等非协作式监视技术,为UAM运行提供全方位精密监视服务。此外,UAM航空器本身也可作为城市智能交通运输系统的网络节点,与地面通信导航监视系统实现协同运作、信息共享,促进城市空间信息网络互联互通[1,62-63]。
3.2 体系结构框架
目前,中国城市空中交通的发展才刚刚起步,远未形成一个完整的城市空中交通管理体系框架。因此,在UAM运行概念设计的基础上,根据中国空情特点与空管政策,参考国内外无人机交通管理(UOM/UTM)体系的建设经验以及UAM的发展方向,提出了中国未来城市空中交通管理体系框架,该体系框架主要由城市空中交通管理平台、城市空中交通信息网络、城市空中交通运营商以及数据支持共享服务方等组成,体系结构如图5所示。其中:城市空中交通管理平台主要由各级管理部门组成,包括空管局、交通局、公安局等。城市空中交通信息网络与国家空域信息系统数据库对接,集成城市空中交通管理、运营与服务所需的空域信息。城市空中交通管理平台通过城市空中交通信息网络为各城市空中交通运营商提供流量控制、间隔保持、风险预警、航行情报等交通服务。城市空中交通运营商提供自身飞行计划信息并接受城市空中交通管理平台的各类服务。数据支持共享服务方利用5G网络、北斗卫星等通信、导航、监视设施为城市空中交通管理方与运营方提供运行数据支持。
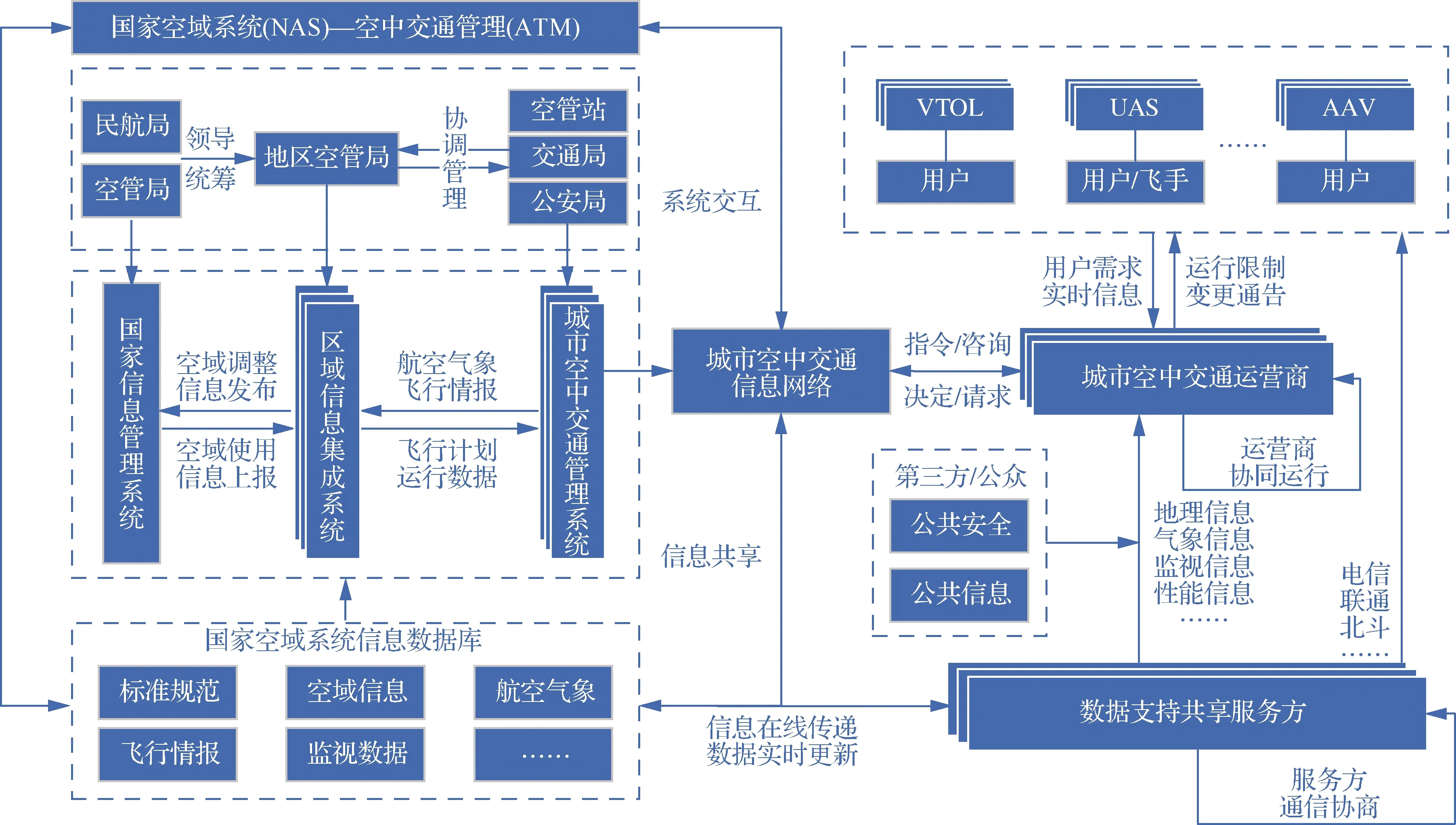
图5 中国未来城市空中交通管理体系框架
1)城市空中交通管理平台:城市空中交通管理平台由国家信息管理系统、区域信息集成系统、城市空中交通管理系统共同组成,形成三级城市空中交通管理体系。
① 国家信息管理系统主要由民航局或空管局负责统筹建设,主要功能包括:收集全国UAM运行区域气象情报、航空情报原始资料,制作并发布UAM航空情报产品;掌握全国UAM空域使用信息,汇总全国UAM飞行计划及运行数据,不定期发布空域调整计划。
② 区域信息集成系统主要由地区空管局负责统筹建设,其主要功能包括:收集并上报区域内UAM航空情报原始资料、飞行计划及运行数据等信息,向区域内各类城市空中交通管理系统提供UAM航空情报产品,负责协调集成各类城市空中交通管理系统,着重协调管理城市交界处的交通服务或管制移交程序。
③ 城市空中交通管理系统主要由地区空管局协调、空管分局(站)与市交通局、公安局等共同建设。城市空中交通管理系统是城市空中交通管理体系的重要支撑,是面向UAM运营商与用户的终端服务管理平台。城市空中交通管理系统主要功能包括:向所在城市服务范围内各项飞行活动提供空域管理、流量控制、航行情报、安全间隔、防撞告警、风险预警、应急处置等服务,向区域信息集成系统提供UAM飞行计划及运行数据等信息。
2)城市空中交通信息网络:城市空中交通信息网络是一个由民航局统一构建与管理的信息共享网络平台。城市空中交通管理平台可通过该信息网络直接与UAM运营商对接,发布交通管制指令,响应用户实时需求,收集动态运行数据,向运营商及用户提供相关飞行服务。
3)城市空中交通运营商:城市空中交通运营商是实体单位,包括城市VTOL航空器制造商、城市空中公交车运营商、城市空中出租车运营商、城市VTOL机场运营商,以及城市空中物流运营商等。运营商之间进行内部沟通与协作,以协同、重叠或耦合的方式,增强UAM整体运营服务能力,从而有助于城市空中交通安全、高效、有序运行。
4)数据支持共享服务方:用户可通过城市空中交通运营商网络访问数据支持共享服务方以获取必要的或增强的数据服务,如地理信息、气象信息、监视信息、性能信息等。数据支持共享服务方还可以通过其他网络(如公共或私有网络站点)直接向用户提供数据支持。
4 城市空中交通管理研究现状
目前国内外关于城市空中交通管理的研究仍处于起步阶段,相关新兴概念与方法可归纳成空域规划、流量控制、交通服务和基础设施建设4个方面,下面分别综述其研究现状,以期为中国城市空中交通发展提供参考和借鉴。
4.1 空域规划
空域是一种重要的自然资源,是航空器运行的必不可少的环境空间。相较于传统高空空域,城市空域资源更加有限,航空器运行更加密集。因此,如何合理地进行城市空域规划配置以增大城市空域容量、有效利用空域资源是城市空中交通首要解决的问题。本节将从空域划设、航路网络与容量评估3个方面综述当前关于城市空中交通空域规划方面的研究。
4.1.1 空域划设
目前UAM空域范围与空域结构均没有明确定义。在UAM发展初级阶段,空域划设范围主要参考现有民航空域划设标准。正如1.1节中所述,中国UAM主要在低空空域运行。北京航空航天大学的全权等[56]在低空无人机交通管理的研究中提出将无人机的飞行高度限制由120 m拓展至300 m,根据机型与任务类型划分无人机飞行高度层。这一空域范围划设思路也符合本文所设计的UAM高级阶段的发展要求。
城市空域与传统高空管制空域不同,必须考虑由建筑物、地形等固定障碍物以及飞鸟、气球、烟花等移动障碍物所产生的地理空间复杂性[64]。合适的城市空域结构将大大提升UAM运行的经济性与安全性。荷兰代尔夫特理工大学(Delft University of Technology, TU Delft)与荷兰国家航空航天实验室(National Aerospace Laboratory, NLR)等研究机构提出了自由空域(Full Mix)、分层空域(Layers)、扇形空域(Zones)、管道空域(Tubes)4种城市空域结构概念如图6所示[57,65-71],分别研究了空域结构对于城市空域安全[68,71]、容量[57,65,68-69]、噪声[66]、复杂性[67]的影响,提出了有别于地理围栏(Geofencing)、空域围栏(Geocaging)的向量围栏(Geovectoring)的概念[70],通过限制航空器的相对飞行速度,以此来减少空域结构复杂度,从而提高城市空域容量与运行效率。TU Delft与NLR的诸多研究结果表明,分层空域在安全、效率、噪音等各方面表现皆为最优,是目前最适合城市空域运行的概念结构。
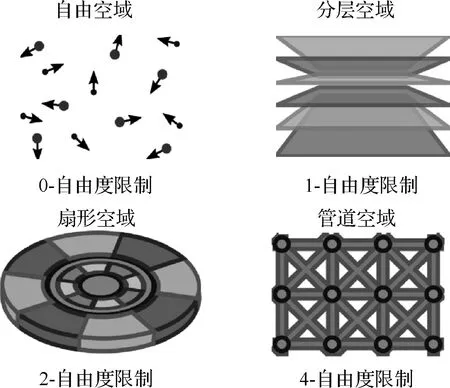
图6 4种空域结构设计概念[65]
NASA的Jang等[59]受到了地面道路交通的启发,提出了3种应用于高层建筑之间的多层通道型空域结构设计概念:空中车道(Sky-lane)、空中管道(Sky-tube)和空中走廊(Sky-corridor)。其中,每种设计概念均有不同的飞行自由度,用以约束与限制航空器运行,且在通道交叉口设置“空中红绿灯”进行城市空中交通流的引导与控制。随之,NASA的Lowry[72]提出了螺旋式空中电梯(Elevators)的概念,通过减少航空器爬升与下降所占空域体积,来提升城市可用空域容量。韩国科学技术高级研究所(Korea Advanced Institute of Science and Technology, KAIST)[73]提出了基于地形图与骨架图的城市空域几何与拓扑特征提取方法,通过地形图提供城市空域三维可用空间的数字度量,通过骨架图挖掘城市空域各个组成部分的潜在连通性,从而更好地抽象与结构化城市空域,提升空域的运作能力。
4.1.2 航路网络
城市空中交通航路网络主要由空中航路结构与地面网络节点组成,其中地面网络节点代指垂直起降机场,而关于垂直起降机场布局规划的研究将在4.4.1小节进行重点讨论。本小节主要针对航路网络的空中航路结构,对现有研究进行梳理和总结。
目前关于城市交通航路网络的研究尚不多见,2016年,加拿大滑铁卢大学(University of Waterloo, UW)[58]针对航路网络结构进行了初步的定义与设计,提出了航路(Airways)、航路交叉口(Intersections)、航路节点(Nodes)、空域区域(Zones)、区域进出口(Inbound and Outbound Gates)等概念,将航路网络拆分成若干通过进出口(Gates)相互连接的区域,通过航路与航路交叉口的有序交替序列实现地面网络节点的连通。这种设计思路与本文3.1.2节中对航路网络的定义类似,然而它仅仅将航路定义为一条具有宽度的空中通道,而没有考虑航路的多样化结构。2017年,澳大利亚昆士兰科技大学(Queensland University of Technology, QUT)[74]做出了世界上首次关于UAS航路网络结构建模的尝试:首先,采用基于数据驱动的建模与分析方法,在不影响现有空中交通运行状况的条件下,选择适合嵌入UAS航路网络的城市低空可行区域;然后,利用改进K-centers聚类算法,搜索候选网络节点位置;最后,基于图论与K最近邻(KNN)分类算法,确定无人驾驶交通网络的航路结构。2018年,新加坡南洋理工大学[75]提出了3种类型的城市低空航路网络设计概念:矩阵节点型航路网络(AirMatrix Network)、建筑节点型航路网络(Over-buildings Network)、道路沿线型航路网络(Over-roads Network),并通过容量与吞吐量指标,比较了这3种航路网络的运行能力。紧接着,提出了适应性城市空域的概念(Adaptive Urban Airspace, AdUrA),以不同类型的航路网络来满足不同的城市空中交通运输需求。
4.1.3 容量评估
空域容量评估通常建立在空域划设与航路网络规划的基础上,用以评估空域可用性以及航路网络通行能力。只有明确空域最大或最佳可容纳航空器数量,才能更好地进行城市空域管理、流量管理以及空中交通服务。
在城市低空空域容量评估的研究方面,加州大学伯克利分校(University of California, Berkeley)的Bulusu等做出了许多贡献[76-80]。2017年,Bulusu和Polishchuk[76]提出了一种基于阈值的低空空域容量评估数学方法。该方法将空域容量定义为:随着交通密度的增加,使空域评估指标(比如冲突率等)发生相变的空中交通量最小值。因此,通过确定空域评估指标与空中交通模型(用于构建仿真场景),即可利用仿真实验评估低空空域容量。Bulusu和Polishchuk[76]选取了多机冲突率(四机或四机以上同时发生冲突的概率)作为空域安全性评估指标,用以验证其所提出的空域容量评估方法的合理性与可行性。随之,Bulusu等[77]又在此基础上加入了每飞行小时危险接近率安全评估指标与成本增加量效益评估指标[81],进一步完善了基于阈值的空域容量评估方法,并且发现安全可能是空域容量的决定性因素。此外,Bulusu等[78]还对比研究了非合作类与合作类无人机在城市环境下的空域容量变化,结果表明,合作类无人机可以有效提高空域容量,并且减少机载冲突探测、解脱、避让系统的计算复杂度。2018年,Bulusu等[79]又提出了吞吐量空域容量评估指标,并且将效益指标中的成本增加量修改为飞行时间延长百分比。在基于悬停避让、人工势场和ICAROUS[82]3种冲突解脱算法的仿真实验下,分别从安全、效益与吞吐量3个角度,对比分析了基于阈值的空域容量评估方法所得出的容量评估结果,最终表明,吞吐量指标可以用来度量空域容量,并且相较于安全与效益指标,吞吐量可能更适合作为冲突探测与解脱算法的有效性评价指标。南洋理工大学[75]在比较航路网络设计概念时,除空域容量之外,也采用了吞吐量指标来描述城市空域的性能。除了Berkeley之外,KAIST[65]提出了一个城市空域容量拓扑分析框架,能够有效地识别城市可用空域。该文献对比分析了禁止飞入(Keep-out)、禁止飞出(Keep-in)以及二者混合的地理围栏概念,结果表明,禁止飞出地理围栏具有更强的鲁棒性,且能够为城市空域提供最大空域容量。(其中,禁止飞入地理围栏通常指地理围栏(Geofencing)[70],而禁止飞出地理围栏通常指空域围栏(Geocaging)[70],有时也指动态地理围栏[83])。
4.2 流量控制
空域规划为城市空中交通运行构建了可行的物理空间,充分利用了空域的空间资源。然而,随着未来城市空中交通发展规模不断扩大,如何合理地分配空域时间乃至时空资源,是城市空中交通运行下一步需要解决的关键问题,这也就是流量控制问题。本节将主要从运行调度与终端排序这2个方面综述当前关于城市空中交通流量控制方面的研究
4.2.1 运行调度
关于城市空中交通运行调度方面的研究,2017年,Balakrishnan和Chandran[84]首次尝试在空域与机场资源配置问题中考虑无人驾驶航空器系统(UAS),并提出了一种分布式整数规划方法来解决无人机存在时大规模空中交通流量管理问题,该方法考虑了飞行连通性约束、机场和空域容量约束以及地理围栏约束,使用列生成算法确定航空器群体最佳时空轨迹。2018年,爱荷华州立大学(Iowa State University, ISU)的Brittain和Wei[85]提出了一种新颖的分层深度强化学习算法,将航空器作为智能空中交通控制系统的核心组成部分进行间隔和排序,安全、自主、高效地解决了航空器在运行调度中的改航、调速等问题,实现了全自动空中交通管制系统在结构化空域中对航空器的自动间隔和排序功能。2019年,ISU[86]针对UAM按需运行特性,提出了一种按需服务与计划服务相结合的UAM混合运营概念,构建了满足UAM运行限制与市场需求的新型运行管理模型,采用混合整数二次规划方法,在利润最大化目标下,解决了UAM运行调度问题。普渡大学(Purdue University, PU)[87]提出了一种基于流体排队模型的弹性无人机流量控制算法,建立了符合实际且易于处理的无人机交通流模型,分析了无人机交通系统性能,解决了未来城市空中交通系统在天气不确定条件下的拥堵问题。斯蒂文斯理工学院(Stevens Institute of Technology, SIT)[88]针对智慧城市中无人机调度问题,提出了3种低复杂度算法,该算法采用降维方法将原问题求解运行时间最小化,通过一种迭代式方法来减少混合整数线性规划的计算复杂度,提高了无人机运行调度效率。2020年,佐治亚理工学院(Georgia Institute of Technology, GT)[89]提出了一种多物网络流框架,用于优化未来UAM机场空中出租车服务运行调度问题,该框架在亚特兰大地区机场空中出租车系统的应用中取得了良好的效果。
此外,为了更好地研究城市空中交通运行方面的问题,NASA分别为低空空域运行[90]、UTM[91]、UAM[92]设计并开发了仿真研究平台与算法。其中,针对城市空中交通网络的自动化管理,NASA[92]扩展了为传统民航开发的高度自动化的自动调节器(AutoResolver),用以对城市自动驾驶航空器进行持续飞行轨迹管理,保证了航空器之间的安全间隔,减少了高密度空域下空中交通的延误。UAM自动调节器应用结果表明,自动调节器可有效地避免UAM航空器危险接近,并且当计划调度时间范围大于UAM航班持续时间时,大部分冲突均在起飞前得以解决,从而产生地面延误;而当计划调度时间较短时,大部分冲突在起飞后得以解决,从而产生空中延误。
4.2.2 终端排序
关于城市空中交通终端排序方面的研究,目前主要以ISU与TU Delft大学为主[93-98]。首先,ISU的Pradeep与Wei研究了双倾转旋翼纵列式(Tandem Tilt-wing)eVTOL航空器[96]与多旋翼eVTOL航空器[97-98]的终端到达轨迹问题,提出了一种以能量消耗为性能指标的多相最优控制算法,在所需到达时间(Required Time of Arrival, RTA)的约束下,构建了一种优化控制框架,确保eVTOL航空器在RTA约束下能够生成最为高效节能的终端到达轨迹。Pradeep与Wei重点以Airbus Vahana[96]与EHang 184[97-98]进行了案例分析与框架验证。然后,TU Delft的Kleinbekman等与ISU的Wei等[94]针对eVTOL航空器最佳RTA计算问题,以最小化延误为目标,考虑eVTOL电池剩余电量约束与垂直起降场容量约束,在保证航空器安全间隔的情况下,首次提出了基于混合整数线性规划的最佳RTA计算方法。并且在之前构建的效能最优轨迹生成工具[96-97]的基础上,提出了垂直终端区空域设计概念,为城市空中交通eVTOL终端排序的研究奠定了基础。与此同时,ISU的Pradeep与Wei[95]也提出了一种用于终端着陆排序的启发式算法,该算法采用插入局部搜索,结合混合整数线性规划与时间推进算法,对混合eVTOL机群的着陆时序进行优化。经验证分析,该算法具有实时优化排序的能力。2020年,ISU的Bertram与Wei[93]又提出了一种垂直起降机场终端区进场运行概念,如图7所示,通过环(Ring)与门(Gate)控制eVTOL进场顺序。在此运行概念基础上,构建了一种基于马尔可夫决策过程的城市空中交通自组织终端排序算法,可以及时处理高密度情况下UAM航空器接近垂直起降点的情况,能够很好地解决UAM终端排序问题。
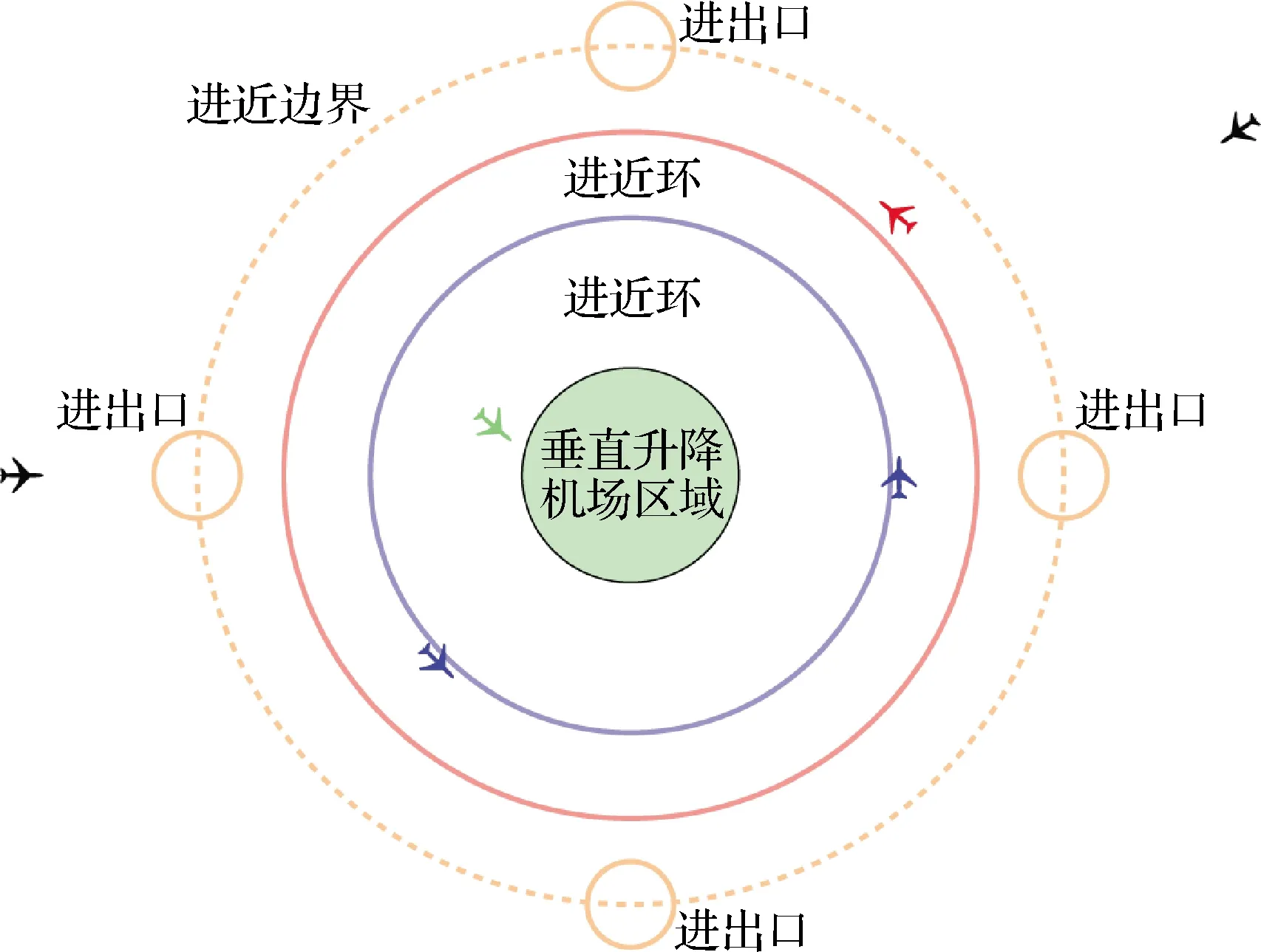
图7 垂直升降机场终端区运行概念[93]
4.3 交通服务
空域规划与流量控制主要从宏观层面优化配置城市空域时空资源,在实现UAM运行的同时尽可能地提高城市空域资源的利用效率;而交通服务主要从微观层面衔接引导航空器无缝融入城市空域系统,为UAM运行带来实际的可能。由于交通安全问题是UAM的首要问题,防撞告警、风险预警与应急响应服务应当是交通服务的核心业务。因此,本节将主要从航迹规划、防撞避险、应急管理3个方面综述当前关于城市空中交通服务方面的研究。
4.3.1 航迹规划
传统航迹规划算法主要可分为2大类:最优化算法与启发式算法。最优化算法适用于小范围局部搜索,可以求得航迹规划问题的最优解。然而,随着算法搜索区域的增加,其计算量呈指数倍增长。相对地,启发式算法引入了启发式函数,能够在可接受的时间范围内给出一个可行解,这样的处理方式大大减少了实际运算量,提高了航迹规划的效率,然而,正因如此,启发式算法很难规划出全局最优航迹。启发式算法可以分为随机型搜索算法和确定型搜索算法,具体包括人工势场法、遗传算法、蚁群算法、启发式A*算法、动态规划等。
2017年,美国航天研究所(National Institute of Aerospace, NIA)与NASA[99]为无人机在低空空域超视距(BVLOS)飞行设计了一种动态航迹规划算法,该算法将快速探索随机树规划技术与形式化验证方法相结合,能够保证无人机在动态航迹规划过程中与其他航空器或地理围栏之间保持一定的安全间隔。该算法还应用了一个启发式函数,用以判断何时终止随机树扩展,能够有效地减少航迹规划算法的运行时间。宾夕法尼亚大学(University of Pennsylvania, UPenn)[100]提出了一种基于搜索的航迹规划算法,该算法利用最优控制思想,能够在合理的时间范围内规划出高维空间的最优飞行航迹,解决了基于搜索的航迹规划算法普遍的扩展节点数量庞大的问题。通过求解线性二次最小时间问题的显式解,能够有效地生成复杂障碍环境下四旋翼无人机在离散空间最优的动态可行航迹。此外,该算法还能够在动态环境中,对四旋翼无人机飞行航迹进行快速在线重新规划。Berkeley[101]也将多旋翼无人机系统的航迹规划问题看作是最优控制问题,提出了一种基于能耗最低的航迹规划方法:在航迹规划一般公式的基础上,考虑无人机地速不变,仅优化无人机航迹导航方向,采用有序迎风法,实现多旋翼无人机最优航迹的数值求解。2019年,SIT等[102]考虑了城市环境下多旋翼无人机的航迹规划问题,提出了无人机在航迹规划过程中的3种防撞方式:悬停、调高与改航。于是,在考虑无人机防撞与充电站约束条件下,分别采用了混合整数线性规划、有序迭代与步进迭代的启发式算法求解多旋翼无人机最优与次优航迹。仿真结果表明,启发式算法不仅能够提供较快的收敛速度,其结果也接近于最优。NASA[103]根据其UTM第四级技术能力(TCL4)的要求,提出了一种基于递归树的无人机实时局部航迹规划算法。该算法能够通过V2V(Vehicle to Vehicle)通信与航迹预测模块,实时感知周围航空器的飞行动态,从而能够在城市复杂空间环境下规划出一条安全可行的飞行航迹。2020年,ISU的Bertram与Wei[104]提出了一种基于马尔科夫决策过程的UAM航迹规划算法,该算法能够在UAM航迹规划过程中有效地解决高密度UAM多机航迹协作式与非协作式碰撞避免问题。圣地亚哥州立大学(San Diego State University, SDSU)[105]考虑了UAM电动飞行器(Electric Aerial Vehicles, EAV)的电池续航性,提出了一种电池充电计划与EAV飞行航迹联合规划方法:首先建立EAV航迹规划的混合整数线性规划模型,然后采用分布式的启发式算法,实现EAV能耗最低航迹的快速规划。
4.3.2 防撞避险
城市空中交通的防撞避险问题主要涵盖2个方面:空中风险(防撞)与地面风险(避险)。其中,空中风险主要是指载人航空器之间碰撞所带来的机载人员的安全风险,而地面风险主要是指由于系统故障、空中碰撞等原因而导致航空器坠机所带来的地面人员的安全风险。关于这两种安全风险的研究与应用可以细分为风险评估与风险缓解或风险规避。其中,对于空中风险而言,风险评估特指冲突概率估计或碰撞风险评估,主要用于冲突探测告警或安全间隔标定,而风险缓解或风险规避特指冲突解脱或碰撞避免,防止航空器发生相撞,保障航空器安全运行。
1)空中风险
传统高空航空器的冲突探测与解脱方法研究较为成熟,比如美国的空中交通预警与防撞系统(Traffic Alert and Collision Avoidance System, TCAS)、欧洲的机载防撞系统(Airborne Collision Avoidance System, ACAS)以及MIT林肯实验室提出的下一代机载防撞系统ACAS-X[106]等。1997—1999年,NASA的Paielli和Erzberger[107-108]提出了面向自由飞行的航空器冲突概率估计方法,通过多维高斯分布飞行误差概率分布假设与直角坐标系线性变换,建立了航空器相遇冲突概率估计解析计算模型,为概率型冲突探测的几何分析方法奠定了坚实的研究基础。2000年,MIT的Kuchar与Yang[109]在NASA的支持下,分别从飞行维度、冲突探测、冲突解脱、解脱行为与是否多机冲突等方面,对63篇关于冲突探测与解脱方面的文献进行了综述与总结,为2000年以后的研究提供了重要的参考价值。
近年来,随着多旋翼无人机的兴起,关于无人机冲突探测与解脱方面的研究也愈发火热。2016年,斯坦福大学(Stanford University)的Mueller和Kochenderfer[110]针对多旋翼无人机系统,提出了一种基于ACAS-X拓展的防撞算法:将多旋翼无人机的防撞问题建立为部分可观测的马尔科夫决策过程模型,针对ACAS-X防撞算法只能进行调向和调高的限制与不足,将水平面的二维速度调整策略加入到防撞算法中,并利用动态规划方法对无人机防撞机动策略进行优化求解。与此同时,Mueller和Kochenderfer[111]又对比分析了4种可以应用于多旋翼无人机的防撞算法:基于部分可观测马尔科夫决策过程的防撞算法(QMDP)[110]、基于模型预测控制的滚动时域方法(MPC)、人工势场法(PF)、改进水平矢量转弯算法(HVT)。仿真分析结果表明,这4种算法都能够在航线偏离与间隔保持之间做出很好的权衡,其中,QMDP在速度调整幅度上具有明显优势。2017年,斯坦福大学的Ong和Kochenderfer[112]基于多智能体的马尔科夫决策过程描述无人机动力学、外部环境与飞手的不确定性,采用多线性插值、最坏情况效用融合、交替最大化等启发式原理,为无人机交通管理提供了一种鲁棒高效的多机冲突解脱方法。2018年,韩国世宗大学(Sejong University)[113]提出了一种基于几何约束与动力学方程的多旋翼无人机动态环境防撞算法,该算法在进行避碰的同时还会利用目标位置逼近方法引导无人机飞往目标点。2020年,NASA[114]提出了基于设计安全间隔(Design Separation)的城市空中交通管理概念:在不同类型航空器混合飞行时(载人/载货无人机与不同飞行规则的有人机),通过设计安全间隔的自适应调整,保障UAM自主运行安全。
2)地面风险
目前关于地面风险评估的研究较为成熟。早在2006—2007年,MIT的Weibel和John[115]与QUT 的Clothier等[60]分别建立了基于事件与基于条件概率的地面风险评估模型,该模型主要包括无人机系统故障率、致命碎片覆盖面积、区域人口密度、碎片穿透系数(或环境遮蔽系数)和坠落缓解措施等参数,搭建了无人机地面风险评估一般框架。2017年,RMIT[116]对33种不同的地面风险模型进行了全面综述,将这些模型分解为失效模型(Failure)、撞击模型(Impact Location)、恢复模型(Recovery)、压力模型(Stress)、暴露模型(Exposure)、事故压力模型(Incident Stress)和伤害模型(Harm)这7个子模型,从不确定性等级、模型特征与模型假设等角度,对比分析了现有33种地面风险模型的优势与不足。NASA等[117]提出了一个无人机运行风险实时评估框架,将无人机系统监控数据与动态环境信息相结合,通过基于贝叶斯网络的概率图模型和无人机地面撞击模型,实现了无人机运行风险的实时评估。丹麦奥尔堡大学(Aalborg University)的la Cour-Harbo[118]通过计算无人机抛体运动微分方程的近似解析解来建立无人机坠机弹道下降情况下的数学模型,为无人机坠落地点预测提供了一种理论计算可能。2019年,意大利都灵理工大学(POLITO)的Primatesta等[119]在已有研究基础上,利用开放地图(OpenStreetMap)获取地理信息数据,提出了一种面向城市环境的无人机运行风险地图绘制方法,初步搭建了无人机运行风险可视化框架。la Cour-Harbo[120]在前期研究[118-119]基础上,针对小型无人机系统超视距飞行,建立基于飞机尺寸、风力风向、参数不确定性的高保真度坠落地点分布模型,以丹麦空域为例,针对单架无人机飞行任务与飞行航迹,进行了实际地面风险分析,以此来衡量小型无人机超视距飞行的可行性。在上述模型中,大多只考虑了无人机系统失效而产生的地面风险,没有将空中碰撞纳入到地面风险的事故致因中。于是,韩国航空宇宙研究院的Kim[121]基于无人机碰撞模型对空中碰撞导致的地面风险评估作出了初步尝试,北京航空航天大学的全权等[56]综合考虑了系统失效、空中碰撞以及其他导致无人机坠机的因素,搭建了无人机地面风险通用模型。此外,为了控制由于各种原因而产生的地面风险,NASA[122]针对传统风险缓解措施(避开人口密集区)的局限性,提出了一个基于实时感知与自主飞行控制的风险缓解框架,通过识别与利用临时安全走廊,使无人机能够进入人口密集区运行。后来,NASA等[123]又针对UAM安全设计提出了危险分析技术,通过功能危险性分析(Functional Hazard Assessment, FHA)与系统理论过程分析(Systems Theoretic Process Analysis, STPA)相结合的方式,评估分析UAM运行的风险环节并有针对性地进行风险缓解,从而为eVTOL适航认证与监管审批提供技术支持。
4.3.3 应急管理
为了更好地提供城市空中交通服务,必须考虑UAM应急管理措施,以保证UAM在发生事故、自然灾害等一系列特殊情况时依然能够平稳有效运行,不至于系统瘫痪,从而形成从空域资源规划到流量调度控制再到运营服务保障的UAM运行管理体系,因此,本文将应急管理作为单独一部分,总结梳理关于UAM应急管理方面的研究。
2004年,美国的Ge等[124]利用MATLAB中SIMULINK模块开发了一个无人机自动应急管理仿真实验工具,将无人机动力学与控制模型、综合预测与自适应智能控制方法集成到实验环境中,可用于开发、测试和验证各种自动化平台。2009年,西班牙的Pastor等[125]提出了一种结构化方法来进行UAS应急响应实验。考虑到突发事件可能与飞行、任务、有效载荷与感知系统4个方面有关,该方法将突发事件来源进行分类,并通过更新飞行包线来抽象描述突发事件对于UAS的影响。根据突发事件严重程度,应急响应范围可能从改变或取消任务目标到取消飞行活动本身。2014年,圣何塞州立大学(San Jose State University, SJSU)与NASA[126]设计了一项模拟实验,用于检验目前UAS应急程序对于空中交通安全、效率以及管制员工作量的影响。研究发现,UAS突发事件对于当前空中交通没有显著影响,并且根据受访者建议,未来UAS标准化应急程序应当尽可能地减少航向与高度变化。2017年,西班牙的Usach等[127]提出了一种将自动应急管理集成到UAS的方法,以结构化和伪形式化的方式表达了应急程序的高质量需求,该方法能够提高应急程序的适用性、一致性、完整性和正确性。2019年,NASA的Baculi等[128]针对UTM的TCL4,提出了一个sUAS机载决策架构,用于实现自主飞行控制系统的安全飞行。sUAS决策器通过监控各项指标,以确定飞行任务的安全性与可行性,并在有限状态机中将飞行状态分为标称、非标称、变更着陆与立即着陆4个部分。NASA通过导航降级与通信故障仿真实验,验证了该决策框架在应急飞行中适时切换飞行状态的可行性。2020年,NASA、FAA、工业界与学术界[129]联合制定了通信导航非标称情况(比如指挥控制通信中断与导航降级)的九项管理要求,由于在2019年UTM的TCL4飞行论证过程中[130],通信导航非标称情况的一些要求无法被满足,于是,NASA[129]提出了通信导航自动应急管理建议,包括标准化通讯导航非标称情况的监测方法以及整合UAS与UAS服务提供商的非标称情况缓解流程。
4.4 基础设施
城市空中交通的有效运行离不开地面基础设施的全面支持。未来城市空中交通应当是空地协同式的交通运输模式,航路网络规划必须考虑地面垂直起降机场布局,UAM运行也必须保持在通信、导航、监视(CNS)的有效范围之内。因此,本节将主要从垂直起降机场与通信导航监视2个方面综述当前关于城市空中交通基础设施方面的研究。
4.4.1 垂直起降机场
目前关于垂直起降机场的研究主要以机场概念设计、机场布局选址、机场容量评估与机场网络分析等为主。2017年,卡塔尔大学(Qatar University)[131]在考虑任务时间约束与电池电量约束的条件下,建立了无人机停靠充电站选址覆盖模型,提出了惩罚加权K-means聚类算法与粒子群优化算法以实现模型快速求解。2018年,慕尼黑工业大学(Technical University of Munich, TUM)的Fadhil[132]基于地理信息系统(GIS),对UAM垂直起降机场布局进行了研究。结合供需标准,采用加权线性组合与层次分析法分析评估了UAM垂直起降机场的最佳布局地点,并针对洛杉矶和慕尼黑地区,提出了多种UAM地面基础设施设计方案。此外,根据停机位、航站楼与起降场面布局的不同,Fadhil还提出了垂直起降机场的三种设计概念:垂直起降站(Vertistop)、垂直起降场(Vertiport)、垂直起降中心(Vertihub)。GT的Daskilewicz等[133]主要以旧金山与洛杉矶为例,基于人口普查数据,计算UAM出行需求与通勤时间,并以相较于汽车通勤时间的减少量最大化为目标函数,利用整数线性规划进行模型求解,最终得到了旧金山与洛杉矶垂直起降机场的最佳分布位置与eVTOL通勤潜在出行次数。NASA的Kohlman等[134-135]建立了一个系统级UAM机场网络模型,该模型可用于估计:满足需求所需航空器数量、给定时间空中交通量以及航空器着陆徘徊所需等待时间等参数。此外,Kohlman等[134-136]还对UAM航空器的能源动力系统做出了初步研究与探索,结果表明混合动力航空器相较于纯电力航空器在运行成本、系统重量等方面具有更大的优势。2019年,MIT的Vascik和John[137]提出了4种拓扑类型的垂直起降机场设计概念,并利用整数规划方法研究不同运营参数下垂直起降机场的运力与容量。GT的Yilmaz等[138]从能量消耗和着陆精度两方面探讨了在大气湍流条件下eVTOL航空器的垂直进近运行,通过构建动力学仿真环境,建立eVTOL自动飞行控制模型来估计着陆精度,研究结果表明,在不同进近剖面和天气条件下,eVTOL着陆精度误差呈椭圆型概率分布。美国航空航天系统设计实验室(Aerospace Systems Design Laboratory)[14,15]考虑VTOL航空器目前存在噪音过大、效率低下等问题,提出了更容易投入运营的STOL航空器起降机场选址方法,并分析了气象(尤其是风)与障碍物对机场布局选址的影响。
4.4.2 通信导航监视
通信导航监视能力是UAM有效运行的重要支撑,目前NASA格伦研究中心正在研究先进通用、可靠安全且经济实惠的CNS系统,以适用于任何环境下的UAS运行。
2016年,Uber在描绘未来城市空中交通系统时[2],提出要开发未来空中导航系统(Future Air Navigation Systems, FANS),如管制员与飞行员的数据链路通信(Controller Pilot Data Link Communications, CPDLC)等,以对传统语音通信方式进行补充完善。Uber拟建立内部通信网络,将结合ADS-B、手机与近地轨道卫星网络以及低功率地面微波数据链路,以实现精确导航与实时通信。NASA[139]将国际民航组织(International Civil Aviation Organization, ICAO)所需导航性能(Required Navigation Performance, RNP)的概念拓展至sUAS中,将RNP不同级别的需求定义为关于sUAS运行风险的函数。通过系统总误差(Total System Error, TSE)计算,能够得出sUAS的RNP等级水平。2017年,NASA与波音公司[140]针对管制与非管制空域运行环境,为所有类型UAS的CNS体系架构提供了设计指南。紧接着,2018年,NASA与波音公司在设计指南基础上,为管制空域运行的大型UAS,设计了可靠安全的CNS体系架构[141],并提出了关于UAS CNS的九个技术成熟等级(Technology Readiness Level, TRL)[142],针对UAS的通信网络、数据链路、系统导航、监视技术等方面,分析了各个技术当前的TRL水平以及未来发展部署方式。与此同时,NASA[143]还探讨了关于UTM命令与控制(Command and Control, C2)通信技术的可靠性、可用性、可拓展性以及其他性能要求,并提出基于商用蜂窝网络的UTM C2链路评估和分析方法。2019年,NASA与波音公司[144]针对ICAO与美国航空无线电技术委员会(Radio Technical Commission for Aeronautics, RTCA)在研究UAS通信网络与航空数据链路过程中存在的CNS方案重叠问题,提出了适用于ICAO与RTCA的通用UAS CNS体系结构概念,以确保全球航空具备一致且安全的CNS框架。NASA与路易斯维尔大学(University of Louisville, U of L)[145]论述了在基于蜂窝的sUAS通信中使用多输入与多输出(Multiple-input and Multiple-output, MIMO)技术的好处,并提出了适合NASA sUAS运行的两种MIMO配置方式(比如天线的类型、大小和数量等)。
除了NASA等机构的研究之外,RMIT的Bijjahalli等[146]以城市环境中UAS的失效模式作为研究对象,对UAS运行的GNSS性能进行了综合分析。在此基础上,提出了考虑城市结构的GNSS导航策略。研究结果表明,与传统最小距离导航策略相比,该方法的精度(约25%)与有效性得到了明显提高。RMIT的Syd[147]考虑到当前UAS飞行主要依托于地面飞手,认为UTM通信模式应当主要为地对地通信,并且提出了建立冗余且高性能的监视系统是UTM的关键所在,UTM监视网络应当为分层网络,包括ADS-B与4G等蜂窝技术,用以弥补不同网络之间的差距。2020年,亿航智能[11]提出建设卫星导航地基增强系统以增强GNSS定位功能来应对城市复杂环境,实现UAM精准导航,并配备视觉导航系统以处理GNSS无法覆盖的情况,确保UAM航空器安全,未来将引入5G通信技术以促进UAM系统的智能化发展。
5 总结与展望
城市空中交通是解决城市交通拥堵问题最有力的方式之一,未来必将在社会各界的共同努力下迎来繁荣兴盛的局面。目前城市空中交通的发展在世界各国均处于起步阶段,城市空中交通管理作为无人机交通管理(UTM)与传统空中交通管理(ATM)的交叉领域,远未形成一个统一且完善的框架体系。本文尝试从无人驾驶航空器系统、城市空中交通系统与传统空中交通系统相互融合的角度,提出城市空中交通发展的4个阶段,并以此设计了城市空中交通管理的运行概念,构建了城市空中交通管理体系结构框架,明确城市空中交通管理的主要内容,梳理总结了城市空中交通管理的主要研究进展(文献见表1),为未来城市空中交通管理发展奠定一定基础。
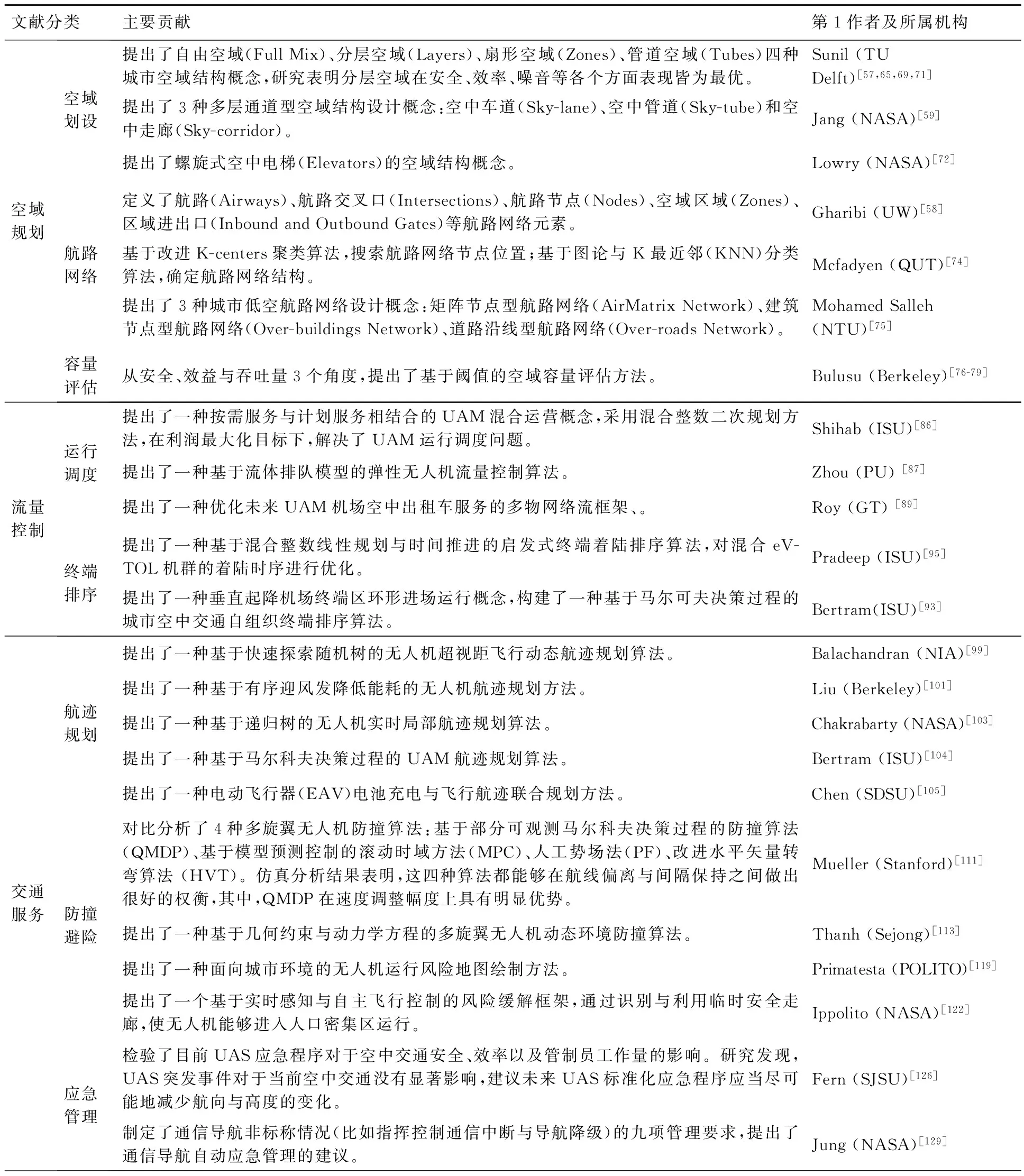
表1 文献总结
然而,城市空中交通作为一种前所未有的新兴交通模式,其管理亦必面临诸多重要挑战:
1)城市空中交通环境随机复杂多变。复杂多变的城市空间,不同于一般的低空空域和传统的高空空域,楼宇密布、人口密集、恶劣天气、飞鸟干扰等动静态、不确定因素随机影响,城市空中交通管理必须考虑各种复杂环境的影响及其带来的公共安全、噪音污染、隐私保护等现实问题。
2)城市空中交通载运工具方兴未艾。未来城市空中交通载运工具将以短距起降、垂直起降的航空器为主,包括无人驾驶航空器,尽管这种航空器研制生产已取得较大进展,但其适航性能、人机模式等仍待深入验证,规模化应用检验较为困难。
3)城市空中交通规划精细化要求高。如何合理开发有限的城市空中资源,满足高密度的城市空中交通需求,是城市空中交通管理的重要基础。城市空中交通规划既要考虑其体系内部低空空域分类划设、航路网络精细设计、起降设施科学布局,也要考虑如何与城市空间设施、道路交通系统等无缝衔接,以确保城市空中交通载运工具精确起降和精准飞行。
4)城市空中交通管控模式尚不明确。虽然本文提出了一种城市空中交通管理体系结构框架、各部分基本定位和协同关系,但其受低空空域管理改革、城市管理等多因素的制约,城市交通局、公安局及其与低空飞行服务保障体系等多部门协同机制仍不明确,城市空管与交通用户之间相互关系尚不清楚,职责差异化、管控协同化、空地一体化的城市空中交通管控模式需深入研究。
5)城市空中交通法律法规标准空白。城市空中交通作为一种新型交通模式,相关法律、法规、规范、标准等几乎空白,亟需通过先行先试的方式探索构建一整套城市空中交通法律法规,通过理论研究与实验验证相结合的方式建立一系列标准规范,比如各类航空器最小安全间隔标准和垂直起降机场最大运行容量规范等。
面向未来城市空中交通发展的需求、问题和挑战,建议从理论研究、系统建设、试点应用等方面全面开展城市空中交通管理研究:
1)加强理论研究。重点研究城市空中交通特性、空域精细规划、流量智能控制、垂直起降航空器冲突智能感知与自主避险等相关基础理论与关键技术,探索建立城市空中交通运行规则、法律法规、行业标准、管理机制等,逐步形成一套科学严谨、完整自洽的城市空中交通管理理论、方法和技术体系。
2)加快系统研制。融合应用北斗、5G、物联网、大数据、人工智能等新技术手段,开展垂直起降机场、站点及通信、导航、监视等基础设施布局规划建设,构建多方协同、空地一体、互联互通的城市空中交通信息网络,研制城市空中交通管理系统及其配套设施设备。
3)开展示范应用。选择空域条件良好、人口密度不大的中小城市或新城区,开展城市空中交通示范性应用试验,验证研究成果和系统效果。走“小城包围大城”的发展之路,由点及面,先行先试,逐步推广,最终建成一个安全、高效、绿色、可持续发展的城市空中交通管理体系,加快推动城市空中交通成为现实。