��ī�㾦����Ͷ����
��ͷ���飺��������
������Ƭ����ӡ�����ӏ]
�岥������������Ƭ��С��Ҷ������������
GB-SARӰ�����굽��ά��������ת������
��������ѧԺԺ����2018��6��
�� (1.���ݿƼ���ѧ ������ѧ�빤��ѧԺ������ 215009��2.�人��ѧ a.���ܹ����빤ҵ�������Ҳ�������Ϣ���ص�ʵ����; b.���ѧԺ���人 430079)
1 �����
�ػ��ϳɿ��״�(Ground-based Synthetic Aperture Radar��GB-SAR)������������ǽ�ʮ����䷢չ�����ĵ���������ң��̽�⼼��������ҪӦ��3����ļ�����������ѹ���������粽��Ƶ������������(SFCW)���ߵ�Ƶ����������(LFMCW)�ȣ��ڻ�ȡ������߷ֱ��ʵ�ͬʱ��ȷ���˽ϸߵĽ��ջ����ʺͻز��ź�ǿ�ȣ��ںϳɿ��״\���������ʵ���ĵػ��״�ϳɿ����ڽ϶�ʱ���ڲɼ��״���䳡���Ķ�άӰ��ͼ���۸������������ͨ���Ƚϱ���ǰ��Ĺ۲���λ��ȡ������Ϣ[1-3]������SAR�����������ط����ںʹ����������ӽǣ��ڵر��ֲ�С����ļ��Ӧ���в�����������SAR��ȣ�GB-SAR�ṹ����װ��ݣ�������Ϊ���Ŀ�꽨���ض��ļ��γ�����������Ŀ������������ȷ��ʱ����ߡ���GB-SAR����Ӱ�����е����ݴ����У�����û�пռ���ߣ����迼�ǹ����������ƽ��λ�Լ�������λ���Ӱ�졣����ʮ������о���չ��Ӧ��ʵ����GB-SARҵ���ڻ��¡�֧�����¡�Σ���塢ˮ���ṹ��¶��ú��ͱ����ƶ����ȷ���չ�������ص������[4-9]��������InSAR�ʹ�ͳ��ز�����⼼����������ʱ�շֱ��ʺ;�������ʱ�ܹ��õ��Ϻõ�Ӧ�á�
GB-SARϵͳ����Ŀ�굽�״����ĵ�б���ƫ���״����߲��������ߵĽǶ����ֱ治ͬ�ļ��Ŀ�ꡣ�����ͶӰ��ʽ��ͬ�ڴ�ͳ����ͼ������ͶӰ�Լ���Ӱ����������ͶӰ�����״�Ӱ��Ķ�άƽ������ϵ�жԱ���Ŀ�꼰��λ�õ�ʶ��һ���ȡ�˹��ж��ķ�ʽ���С����ַ�ʽҪ�������Ա�߱�һ���ľ��飬����������ɱ���Ŀ�������Ĵ���ʶ����ˣ����״��άƽ������ϵͳ�ͳ��õ���ά��������ϵ��ϵ������dz�������,������������߱�����ʶ�����ȷ�ԣ�Ҳ�����ڳ��������Ա��μ�⡢���ּ���ֶε��ں��Լ����ɹ�ֱ�ӻ��ӵ�ת��Ӧ�á����������о���GB-SARӰ�����굽�ط���ά����任�������ɹ�������ʵ��GB-SAR���Ӧ���жԱ��ε���ά����ͷ������Ը��õ�������η�չ��ʱ�չ��ɡ�
2 ���Ʊ任������������任����������
����SAR��������Ŀ��������������Զ������������SARӰ������ϵ�����������������GB-SAR���þ�����ԽϽ��ҷ����ӳ������ȴ��γ�����������θ�������ϵ��GB-SAR��̽��ı����Ǽ��Ŀ��ʵ�ʱ������״�������(Light of Sight��LOS)��ͶӰ������Ԫ���״����ĵ�Ϊ���ģ��Ե��״����ĵ�б��Ϊ�뾶��Բ����ͶӰ������ͶӰ���ϡ�GB-SAR��ͶӰ��ʽ���������˾�����ͷ�λ��ֱ浥Ԫ�Ļ�����ʽ��ͬʱҲ������GB-SARӰ������ϵͳ�任�ķ�ʽ������
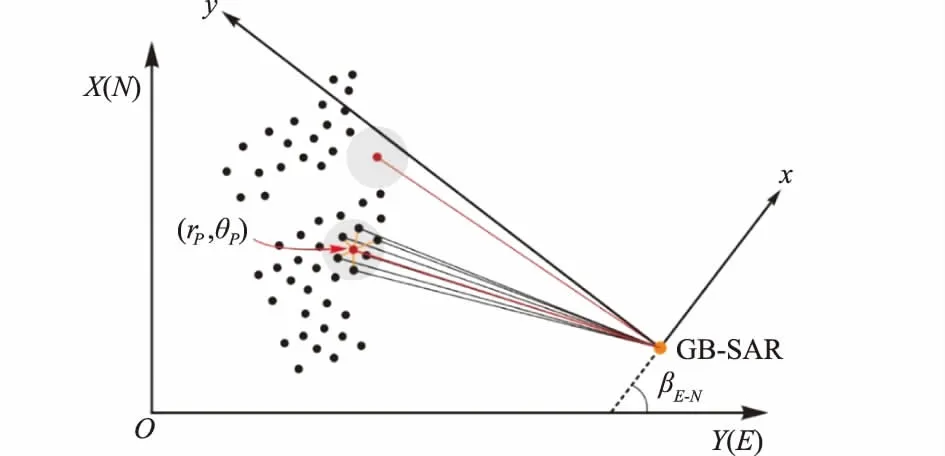
Ϊ�������������¼��裺��С�����ڸ�˹-������ͶӰ������ͶӰ���Σ����״��άƽ������ϵ��˹ƽ������ϵ��ͬһ��ƽ��������ϵת��Ϊ0��������ƽ�Ʋ���X0��Y0���۸߳����˹ƽ������ϵ���ɵ�����ά����ϵ����XY�ṹ����������ϵ������GB-SAR�ڲ��ļ��ι�ϵ��ѡ�����˹ƽ������ϵƽ�е�ƽ����Ϊ�״����ͶӰ�棬��Ŀ��㵽�״����ĵ���Ը߶Ⱦ���Ŀ��㵽��ƽ��ĸ߶ȣ���ά��������ϵ���״�ƽ������ϵ�ļ��ι�ϵ��ͼ1��ʾ��

ͼ1 ��ά��������ϵ��GB-SARӰ��ƽ������ϵ�ļ��ι�ϵFig.1 Geometric relationship between 3D terrain coordinate system and coordinate system of GB-SAR imaging plane
�����������裬���Լ���õ��״��άƽ������ϵ�е�i�С���j�е���ԪTij�ڸ�˹ƽ������ϵ�µ�����Ϊ
(1)
ʽ�У�θijΪ��Գ���ͶӰ��ĸ߶Ƚǣ�(Sij,βj)ΪĿ������״��άƽ������(xij,yij)�ļ�������ʽ����
�������Ʊ任�������Ƶ�ģ�ͣ����״��άƽ����������˹ƽ�����꣬��
(3)
����һ�����Σ�������������m��
(4)
����ʽ(1)����
(5)
�����״�������ƽ���ڸ�˹ƽ�棬�״��ͬ��ƽ���ڸ�˹ƽ���һ��Ŀ��ƽ����й۲⣬�״����ĸ߳���Ŀ��ƽ�����Hij��������ͬ����Ը߶�Hij��������������m��
��ͼ2�п��Կ��������ž�������ӣ���������m��С����С�������ɿ쵽����ֱ��������0��������������֪�������Ʊ任�������Ʒ�����õ�mֵ��С�̶������������������״�������������任���÷����������ھ����״��Զ����Χ��С�ľֲ�������������״����ĵĸ߶ȱ仯���ܹ��ھ��ҡ�
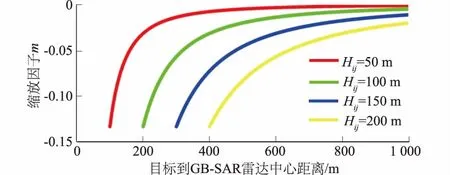
ͼ2 ��������m�ı仯����Fig.2 Variation rule of scaling factor m
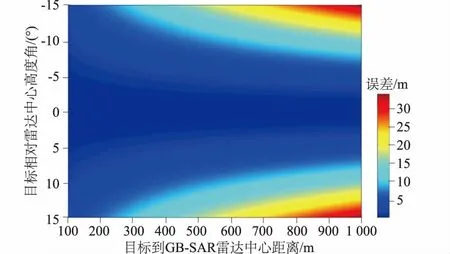
ͼ3 ����ֱ�ӱ任��������Fig.3 Error analysis for direct coordinate transformation
����������״�Ӱ��ͶӰ��ʽ��ֻ����ƽ��ת����ת��ԭ��ƽ�ƣ����״��άƽ������ϵת������˹ƽ������ϵ�У�����ֵ�����ĵ�λ���ʵ���Ͼ����״���Բ���ߵ�ͶӰλ�������˹ƽ�������ͶӰ֮��ľ����ֵΔSij��ΔSij��б��߶Ƚ�֮��Ĺ�ϵ��ͼ3��ʾ����֪���÷�����Ŀ������ֲ������״������߽Ͻ�ʱ�����ĵ�λ����С������߶Ƚ���5°���ڣ�ֱ������任���������ĵ�λ�����4 m���ڡ���ʹĿ������������״������߸߶Ƚ�[-5°, 5°]֮�ڵ�Ҫ����ʮ�ֿ��̵ģ���ʵ���������������㡣
3 �ⲿ�߳���Ϣ����GB-SARӰ�����굽�ط���ά����ת��
������������֪��GB-SAR���������ͶӰ��ʽ����Ӱ���������ʵ��ƽ�����귢��ƫ�ƣ��Ҳ�ͬ�߶Ⱥ�λ�õĵ��ε�����ƫ�ƵĴ�С�Dz�һ���ġ�ʵ��GB-SARӰ�����굽�ط���ά��������߾��ȵ�ת�����㣬��Ҫ�����ⲿ�߳�����(��������ֵ���ģ��(DTM)/���ָ߳�ģ��(DEM)����ά���ε������ݵ�)���С�����ά��������ϵ�µĸ߳����ݿ�����GB-SARͶӰԭ������Ϊ�״�ͶӰ���ƽ�����꣬������������GB-SARӰ����Ԫ�����ƥ���ϵʵ�����������Ԫ��ά���꣬��Ҫ�������¼������衣
3.1 ��ϵˮƽ��ת
��ȷ���״����ĵ���ά���������������ϵ�ij���һ�£����������Ҫ����GB-SAR��άӰ������ϵ����ά��������ϵ��ˮƽ��ת�Ƕȵļ��㡣ͼ4��ʾ��GB-SARӰ��ƽ������ϵ�͵ط�ƽ������ϵ֮������ϵ��
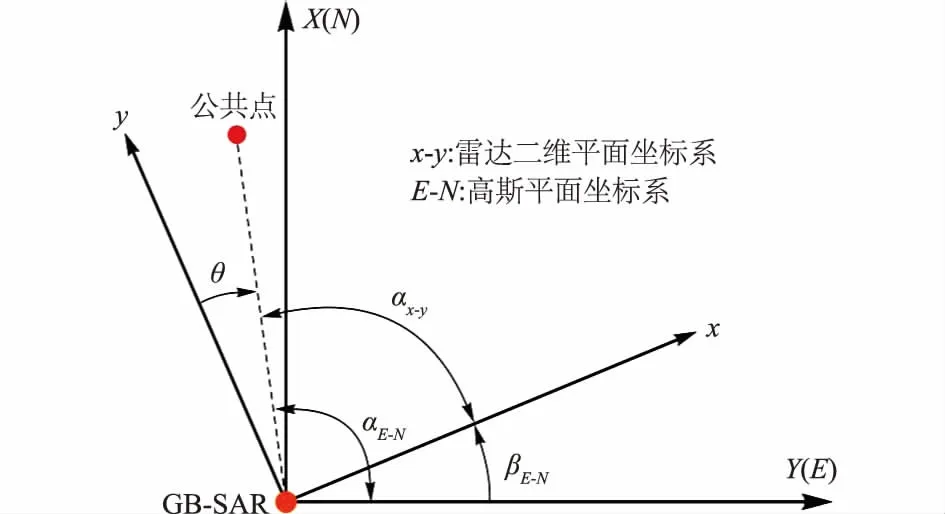
ͼ4 ����ϵ��ϵ��ϵ��ˮƽ�Ƕ���תFig.4 Horizontal angle rotation of coordinate axes
ͼ4��x-yƽ����GB-SAR���״��άƽ������ϵ��E-Nƽ���ǵط���˹ƽ������ϵ��θ���״��άƽ������ϵ��Ŀ��㵽�״������߷����ƫ�ǣ�αx-y��x-y����ϵ��Ŀ���ļ��ǣ�αE-N��E-N����ϵ��Ŀ���ļ��ǣ���βE-N��Ϊ������Ҫ�������ϵˮƽת�ǡ�ͨ������£���ϵˮƽת�ǵļ������ù��������[10]����ʵ�ʼ����������㹻С����Ȼ�ر�������Ϊ���Ƶ㡣һ����Ҫ����Ƿ��������������ýǷ���������ά�ռ����꣬ͬʱ���״�Ӱ����ʶ����ýǷ�������Ӧ��Ԫ���״�ƽ�����ꡣ
3.2 ��ά��������ļ����껯
�����״�Ӱ���й�ע������һ��Ԫ��P�����״�ƽ������Ϊ(xP,yP)����Ӧ�ر���ά����ϵ����Ϊ(EP,NP,ZP)��P����״�ƽ������(xP,yP)Ҳ���Ա�ʾΪ��������ʽ����ʽ(6)��
(6)
��Ԫ��ά�ռ��ϵ�Ļָ�ʵ���Ͼ�����ȡ�״�Ӱ���е�P������ά���ε��еĶ�Ӧ�㡣Ϊ�˴ﵽĿ�ģ�ͨ���Ƚ���ά�������ݰ���ʽ(7)ת��Ϊ��άƽ���ϵļ�������ʽ���Ӷ����Խ���ά�������ݵļ������������״���Ԫ�ļ�����ֱ�ӽ��бȽϣ���һ���̳�Ϊ��ά����ļ����껯��
(7)
ʽ�У�rTerrain��θTerrain�ֱ�Ϊ���ε㼫����ļ����ͼ��ǣ�(E,N,Z)Ϊ���ε���ά���ꣻ(Eradar,Nradar,Zradar)Ϊ�״���������ά��������ϵ�µ����ꡣ
3.3 GB-SAR����ͶӰ������Ԫ����ε��ƥ��
����ά�������ݼ�����ת�������伫���������а�����С������Ѱ��P(rP,θP)�Ķ�Ӧ�㣬�����õ����ά������Ϊ��Ԫ��P(xP,yP)��Ӧ����ά�ռ�����ϵ�µ����꣬��ͼ5��Ϊ��֤����Ŀɿ��ԣ�����ȡ��Ԫ����ά��Ϣʱ�������Ŀ�������ѡ�������С��ǰ�����㣬��������ά�����ƽ��ֵ��Ϊ��Ԫ����ά���ꡣ
ͼ5 �����껯�������״���Ԫ��ƥ��Fig.5 Coordinate polarization of point cloud and matching with GB-SAR pixel
4 ���鰸������
������ˮ����Ŧλ�ں���ʡ�����ؾ��ڳ���֧���彭�����ϣ��Ͼ��ʩ��207 km���¾�߰���ˮ��վ50 km�����̿��������Է���Ϊ�������з��顢���˵��ۺ�Ч�档��Ŧ�����ɻ������������ӡ�йˮ������Ұ���ˮʽˮ��վ����ֱ��������ɡ�ˮ��վλ���Ұ�����ˮʽ���泧����4��ֱ��Ϊ9.5 m��������ֱ��8 m��ѹ���ֹܣ��ֱ����4̨300 MW�Ļ���ʽˮ�ֻ��顣��������ԤӦ��������������������ѹ���ֹܿ����γ�170 m�ĸ߱��£����û������ֲ��û�������ԤӦ��ê������ǿɽ����ˮ�ȴ�ʩ������
��������Ҫ����������Ұ����糧���ϲ�߱��½��м�⡣�״��豸��װ�ڴ�������������Լ1 km�������찲װ��������ˮƽ״̬���״��������ij�������Ҳ࣬�������Ұ��߱��¾������״������ӳ���Χ�ڣ���ͼ6���ڽ����������μ������֮ǰ���������ø߾���ȫվ�ǻ�ȡ�˵���ռ����ꡣ�ڵ������˹̶��̻�λ�ô����ù̶��߶ȵ��⾵�������ֱ�����������⾵���ĵ���ά���ꡣ�������״�������ά����Ϊ(2 200.608 1��1 109.037 4��106.044 6)(��λ��m)��
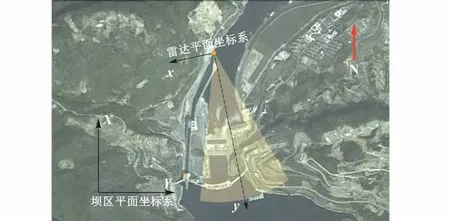
ͼ6 ����ƽ������ϵ���״�ƽ������ϵFig.6 Plane coordinate system of dam area and GB-SAR plane coordinate system

��1 ��վ����ϵ��ط�����ϵ���Ƶ��Ӧ��ϵTable 1 Coordinates of control points in scanner coordinate system and dam area coordinate system
4.1 ��ά����ɨ���DZ��¸߳���ȡ
���������õ��漤����άɨ����RIEGL VZ400�ɼ��˸߱��¼����ڽ�����ĵ������ݣ���ͼ7��
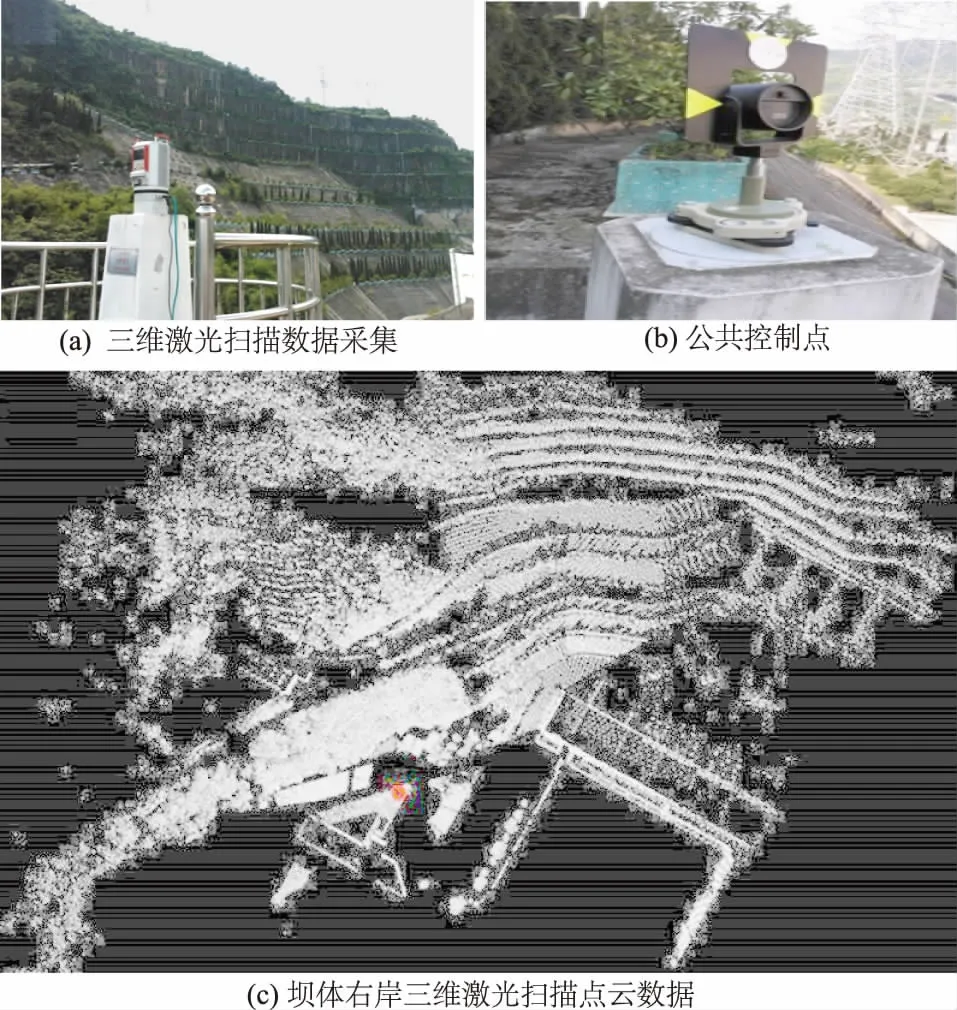
ͼ7 ��ά����ɨ���ǵ��ε������ݲɼ�Fig.7 Acquisition of terrain point cloud data using 3D laser scanner
ֱ�ӻ�ȡ����ά����������Ȼ����ɨ������ά����ϵ�£�Ϊ��������ά����ɨ���ǵĵ�������ת�����ط���ά����ϵ���ڱ����ϵļ������Ƶ��ϲ��跴��Ƭ��Ϊ���Ƶ㣬��ͼ7(b)�����������й���ȡ��4����Ϊ����Ŀ��Ƶ㣬��ɨ������ά����Ͱ�����ά�������ڱ�1��
��������Ԥ����ʱ�������±����ֲ����������������������ά�������ݡ��ڵõ����Ƶ�2������֮��ͨ��Ӧ�ô�ת�ǵ��߲�������任�������õ����µ����ڵط�������ά����ϵ�µ����꣬��ͼ8��ʾ��
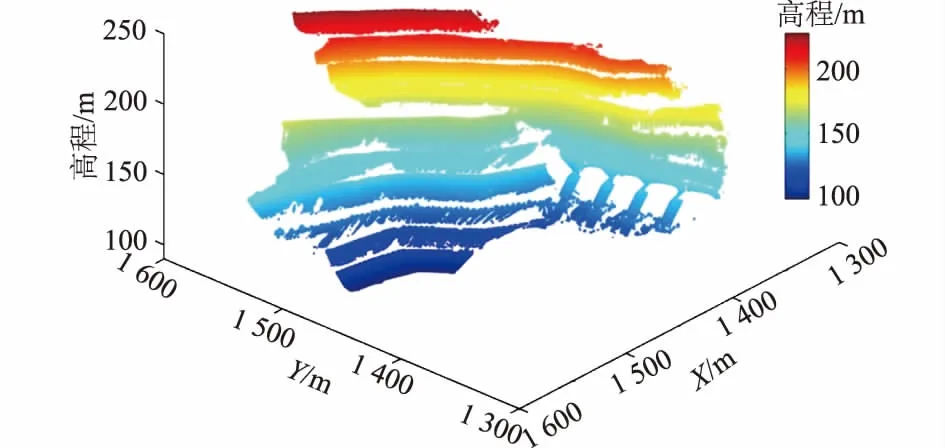
ͼ8 ��������ϵ�±��µ��Ƶ���ά����Fig.8 Three-dimensional coordinates of point cloud of a slope in dam area
4.2 ��ϵˮƽת�ǵļ�������ά��������ļ����껯
����ɿռ�����ϵ�ı任֮����ά����������������״�����Ϊԭ���ˮƽ���ϣ���ͼ9(a)�����ڰ�������ϵ�ĺ�������ᶨ��պ����״�ƽ������ϵ�ĺ�������ᷴ��������Ҫ��ƽ�Ƽ�����x,y����ֵ�����Ŵ�������õ��ֲ�����ϵ�µĵ��ε��ƣ���ͼ9(b)��
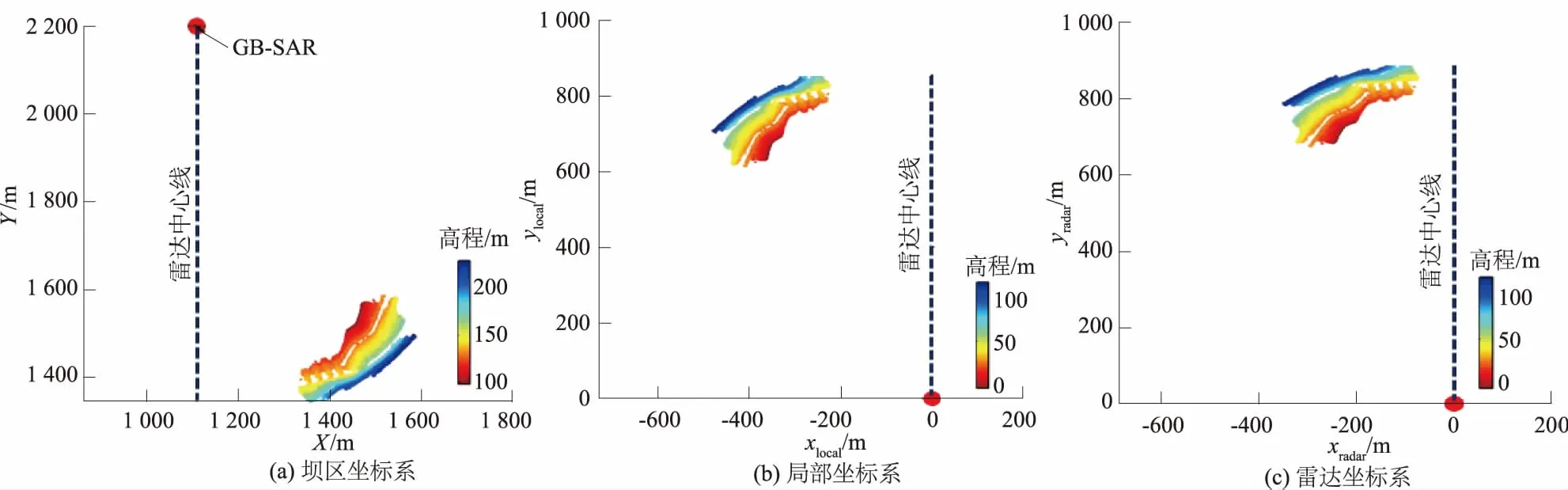
ͼ9 ��������ϵ���ֲ�����ϵ���״�����ϵ�µĵ��ε�������Fig.9 Coordinates of terrain point cloud in dam area coordinate system, local coordinate system,and GB-SAR coordinate system
��������ϵ�;ֲ�����ϵ�У��糧�����ṹ�����ɱ档��ʱ�ֲ�����ϵ���״�ƽ������ϵ������֮��ֻ���һ����ֵΪ��ǵ�ˮƽת�ǡ���ά����ļ����껯���λ��ֻ��Ŀ��㵽ԭ���б�������ڹ�ԭ���ˮƽ��ĸ߶��йأ�����y��ij���û�й�ϵ�������������������ɴ�����ά�����γɣ���˿��Խ�Ϊ��ȷ��ȷ��ֱ�����껯��ķ�λ�ǣ��������ṹ���״�Ӱ�������ɵ���ͬ��ռ�ݶ���ֱ浥Ԫ��Ҳ�ܹ���Ϊ��ȷ��ȷ���䷽λ�ǡ���˱������ó�������ֱ������ϵˮƽת�ǣ�Ϊ0.177 142 rad������������ת��ʽ���㼫���껯�������˳ʱ����ת0.177 142 rad������꣬��ͼ9(c)��
4.3 GB-SARӰ����Ԫ�߳���ȡ
�ڽ���ά���꼫���껯�������ϵˮƽ����ת֮����Դӵõ����״�ƽ������ϵ��Ѱ��GB-SARӰ�����Ԫ�Ķ�Ӧ�㡣��ǰ�������������в��õ�������Ԫ������С��Ϊ��Ӧ��ά���ε�Ŀ��ѡ�����ֱ���ڼ����껯�������ϵ��Ѱ�����״�Ӱ����Ԫ������������Ŀ��㣬���õ���Ӧ�ļ����껯ǰ����ά������Ϊ��Ԫ�������ꡣ���˱������GB-SARӰ����Ԫ�ĸ߳���ȡ������ֻҪ����δ�����䶯������ȡ������Ӱ��(�����ź�ǿ��ͼ�����ͼ�ͱ��ηֲ�ͼ��)������������������õĹ�ϵӳ�䵽�ֲ���ά����ģ���ϡ�
ѡȡ�߱���������״�Ӱ���������(Thermal Signal-to-Noise Ratio��TSNR)��ֵ��Ϊ10 dB����Ӱ���в����źŽ��������Ծ���ֵ�������TSNRӰ������ֵ������Ӧ�İ�����ά����XYH�����Ƶ��߱��µ���ά����ģ���ϡ�Ϊȥ������ģ���������Ԫ���ڼ���ǰ�趨��̭����Ϊ3 m�������þ������Ԫ�����������άģ���ϣ���ͼ10�����������и߱�������ƫ���״������ߵĽǶ���Щ��ֻ�и߱����Ҳಿ��������״ﷴ���źŽ�Ϊ���롣������������Ե��Ϊ���ԣ���ֱ������4����ˮ������ڣ�������Խϸߵ�TSNRֵ��������GB-SARӰ����Ԫ��ʵ�ʵر��ṹ���ϽϺá�
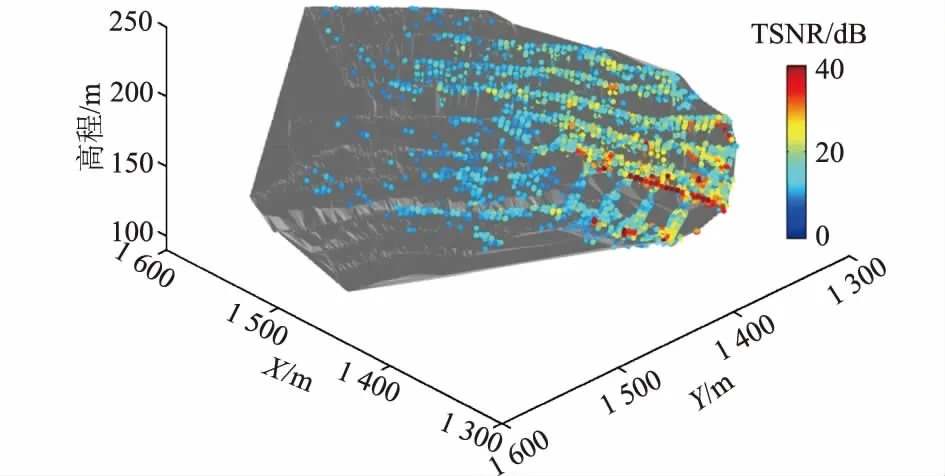
ͼ10 GB-SAR TSNRͼ����ά����ģ�͵�ӳ��Fig.10 Mapping of GB-SAR TSNR graph to 3D surface model
5 �� ��
(1)����GB-SAR�������ͶӰ��ʽ�������ԣ�����Ԫ��Ӱ������ϵ�е�λ�������ʵ�ʵ������귢������ƫ�ƣ�ʹ�ý����˹�ʶͼ��ʽ�Ա����������ʶ���뻮�����ײ���ƫ������Ϊ����ֱ�Ӻ���Ч�ؽ�����μ��ɹ����б�Ҫ���״�Ӱ������ϵͳ�볣������ϵͳͳһ������
(2)�������Ʊ任�������Ʒ�������GB-SARӰ������任ģ�Ͳ����ܣ����״����ӳ���һ�����ʱ�ײ����ϴ�����ȷ��GB-SARӰ�����굽�ط���ά����任����˼�����Ԫ������״����ĵĸ߶���Ϣ�������о��Ĺ˼��ⲿ�߳���Ϣ��GB-SARӰ��������ά�任�������������ܹ���������ת������Ŀǰȱ�ٶ�ת�����ȵ�ֱ�Ӷ������������ڱ��߿�������Ƿ����������Զ�������������GB-SARӰ������ϵͳ��ת�����ȡ�
�ο����ף�
[1] PIERACCINI M, FRATINI M, PARRINI F,etal. High-speed CW Step-frequency Coherent Radar for Dynamic Monitoring of Civil Engineering Structures[J]. Electronics Letters��2004,40(14):907-908.
[2] �� ��,�� У.�ػ�SAR�������ԭ�������α���Ӧ���о�[J].�����Ϣ�빤��,2012,37(4):22-25.
[3] RÖDELSPERGER S. Real-time Processing of Ground Based Synthetic Aperture Radar (GB-SAR) Measurements [D]. Darmstadt, Germany: Technische Universität Darmstadt, 2011.
[4] MARGOTTINI C, ANTIDZE N, COROMINAS J,etal. Landslide Hazard, Monitoring and Conservation Strategy for the Safeguard of Vardzia Byzantine Monastery Complex, Georgia[J]. Landslides, 2015, 12(1): 193-204.
[5] ATZENI C, BARLA M, PIERACCINI M,etal. Early Warning Monitoring of Natural and Engineered Slopes with Ground-based Synthetic-aperture Radar[J]. Rock Mechanics and Rock Engineering, 2015, 48(1): 235-246.
[6] ��־ΰ,����ƽ,��ѧ��.�ػ��״�ϵͳIBIS-L�ڴ�ӱ��μ���е�Ӧ��[J].������ѧԺԺ��,2014,31(10):104-107.
[7] TARCHI D, ANTONELLO G, CASAGLI N,etal. On the Use of Ground-based SAR Interferometry for Slope Failure Early Warning: the Cortenova Rock Slide (Italy) [M]��Landslides. Berlin��Springer Berlin Heidelberg��2005��337-342.
[8] TRAGLIA F D, NOLESINI T, INTRIERI E,etal. Review of Ten Years of Volcano Deformations Recorded by the Ground-based InSAR Monitoring System at Stromboli Volcano: A Tool to Mitigate Volcano Flank Dynamics and Intense Volcanic Activity[J]. Earth-Science Reviews, 2014,139:317-335.
[9] SEVERIN J, EBERHARDT E, LEONI L,etal. Development and Application of a Pseudo-3D Pit Slope Displacement Map Derived from Ground-based Radar[J]. Engineering Geology, 2014, 181: 202-211.